
Trên xe ô tô điện, hàng chục bộ điều khiển điện tử (ECU) cần giao tiếp liên tục để đảm bảo vận hành ổn định và an toàn. Các giao thức truyền thông như CAN, LIN, FlexRay và Automotive Ethernet giúp truyền dữ liệu giữa pin, động cơ, hệ thống sạc và các cảm biến với độ chính xác và tốc độ cao. Bài viết này sẽ giúp bạn hiểu rõ vai trò, đặc điểm và ứng dụng của từng giao thức truyền thông trong hệ thống điều khiển xe ô tô điện hiện đại.
1. Tổng quan về xe điện
Xe điện (EV) đang định hình lại ngành công nghiệp ô tô về mặt bền vững và công nghệ. EV không chỉ giảm khí thải, hiệu ứng nhà kính và sự phụ thuộc vào nhiên liệu hóa thạch, mà còn thúc đẩy sự đổi mới trong khí động học, vật liệu nhẹ, pin, hệ thống truyền động, bộ biến tần, phần mềm, hệ thống hỗ trợ người lái tiên tiến (ADAS), hệ thống sạc, cáp điện và nhiều hơn nữa.
Ngoài ra, hiệu suất, phạm vi hoạt động và chi phí xe cũng đã có những tiến bộ, với ngày càng nhiều tài xế cân nhắc việc chuyển đổi và từ bỏ những chiếc xe chạy bằng nhiên liệu truyền thống. Mặc dù phần lớn quyết định này thường phụ thuộc vào thời lượng pin và phạm vi hoạt động, nhưng một cải tiến không kém phần quan trọng là khả năng “giao tiếp” của xe.
Nhiều giao thức truyền thông được sử dụng trong xe điện hoặc để sạc xe, bao gồm:
- Mạng điều khiển khu vực (CAN) để giao tiếp giữa các thành phần của xe và các hệ thống bên ngoài.
- Giao thức Modbus và Mạng kết nối cục bộ (LIN) được sử dụng bởi một số thành phần xe phụ trợ không yêu cầu truyền dữ liệu thời gian thực.
- Các giao thức như CHAdeMO và CCS có vai trò quan trọng trong việc sạc nhanh.
- ISO15118 cho phép sạc hai chiều và tích hợp xe với lưới điện (V2G).
- Ethernet là giải pháp trọn gói cho mọi nhu cầu truyền dữ liệu băng thông cao như phát trực tuyến video, hệ thống thông tin giải trí và ADAS trên xe điện.
- Wi-Fi và Bluetooth cho phép tích hợp điện thoại thông minh hoặc thiết bị vào xe điện.
Có thể bạn quan tâm: Khóa học Kỹ thuật sửa chữa xe ô tô Điện – xe ô tô Hybrid
2. Mạng điều khiển khu vực (CAN)
Mạng CAN là giao thức truyền thông chính được sử dụng trên hầu hết các loại xe. Hầu hết các nhà sản xuất ô tô Bắc Mỹ và Châu Âu (70% trên toàn cầu) đều sử dụng công nghệ mạng CAN cho việc quản lý động cơ, hệ thống an toàn và các tính năng tiện nghi. Hầu hết các xe hạng sang và cao cấp đều được tích hợp đầy đủ hệ thống CAN, và chỉ một số ít mẫu xe giá rẻ vẫn sử dụng LIN hoặc Multiplexing.
CAN là “xương sống” giao tiếp của tất cả các phương tiện hiện đại. Nó cho phép các bộ điều khiển điện tử (ECU) khác nhau – chẳng hạn như bộ điều khiển động cơ, túi khí và ABS – giao tiếp với nhau theo thời gian thực, chia sẻ thông tin cần thiết để xe vận hành trơn tru và an toàn.
CAN cũng được sử dụng trong các ngành công nghiệp khác, bao gồm hàng không, vũ trụ, y tế và tự động hóa công nghiệp, chủ yếu vì tính hiệu quả về chi phí, độ tin cậy và khả năng mở rộng.
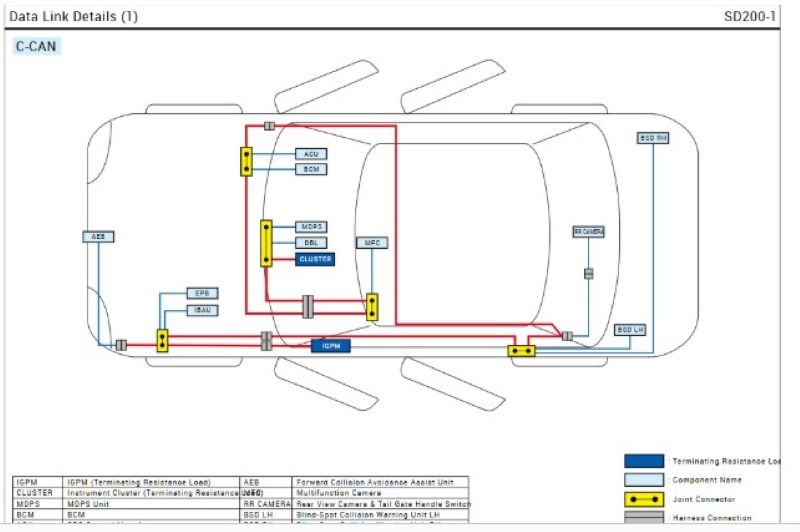
Một mạng CAN chỉ sử dụng hai dây và trao đổi dữ liệu thành các tin nhắn nhỏ, được ưu tiên hóa, đảm bảo các thông tin quan trọng như tín hiệu phanh hoặc túi khí không bị trễ. CAN dựa trên cơ chế đa truy cập, cho phép các thiết bị thay phiên nhau truyền, phát hiện và giải quyết va chạm để đảm bảo việc truyền tải tin nhắn. Giao thức này có các cơ chế tích hợp đảm bảo tính toàn vẹn dữ liệu và độ tin cậy của tin nhắn.
Giống như các phương tiện chạy bằng nhiên liệu thông thường, CAN trong xe điện tạo điều kiện thuận lợi cho việc giao tiếp giữa các ECU, bao gồm bộ điều khiển xe (EVCU), bộ điều khiển động cơ (ECM), hệ thống quản lý pin (BMS) và các thành phần quan trọng khác. Các hệ thống này liên tục trao đổi dữ liệu, chẳng hạn như điện áp pin, dòng điện, nhiệt độ, tốc độ động cơ và nhu cầu mô-men xoắn.
Ví dụ, CAN cung cấp một liên kết quan trọng giữa BMS và các hệ thống khác trong xe điện. BMS theo dõi tình trạng pin, nhiệt độ và mức sạc còn lại, truyền thông tin này đến EVCU và người lái xe thông qua mạng CAN. CAN cũng hỗ trợ giao tiếp giữa hệ thống pin, hệ thống làm mát và EVCU, giúp quản lý nhiệt độ pin.
CAN còn cho phép các tính năng an toàn khác như phanh tái tạo, kiểm soát lực kéo và kiểm soát ổn định điện tử hoạt động hiệu quả. CAN cho phép giao tiếp thời gian thực giữa hệ thống phanh và bộ điều khiển động cơ để áp dụng phanh tái tạo.
CAN cũng rất cần thiết cho việc giao tiếp giữa xe điện và trạm sạc, và được sử dụng bởi các giao thức khác (như IEC 61851) để điều khiển phân phối điện, kết nối và kiểm tra an toàn trong quá trình sạc. Các công nghệ lưới điện thông minh mới như V2G cũng sử dụng CAN để giao tiếp giữa xe điện và lưới điện. Nhờ đó, xe điện tối ưu hóa việc sử dụng năng lượng và điều chỉnh thông minh việc sạc và xả để đáp ứng nhu cầu của lưới điện.
3. Tiêu chuẩn ISO 15118
ISO 15118 là tiêu chuẩn quốc tế đề cập đến việc giao tiếp giữa xe điện (EV) và cơ sở hạ tầng sạc, cho phép truyền tải điện hai chiều và các tính năng sạc thông minh. Mục tiêu là cải thiện an toàn, đẩy nhanh quá trình sạc và khuyến khích tích hợp lưới điện EV.
Bằng cách thiết lập một giao diện chuẩn hóa, ISO 15118 cũng tăng cường khả năng tương tác giữa nhà sản xuất và trạm sạc. Tiêu chuẩn này kết hợp hai thành phần chính – bộ điều khiển giao tiếp xe điện (EVCC) và bộ điều khiển giao tiếp thiết bị cung cấp (SECC). EVCC là bộ điều khiển bên trong xe xử lý giao tiếp với trạm sạc. SECC là bộ điều khiển bên trong trạm sạc chịu trách nhiệm giao tiếp với xe điện.
Sử dụng tiêu chuẩn này, xe điện có thể nhận điện từ lưới điện và gửi điện trở lại lưới điện (V2G), hỗ trợ tính ổn định lưới điện và quản lý năng lượng. ISO 15118 cũng giúp điều chỉnh việc sạc dựa trên điều kiện lưới điện, sở thích của người dùng và biểu giá điện, tối ưu hóa việc sử dụng năng lượng và chi phí. Ngoài ra, giao thức này hỗ trợ xác thực và thanh toán tự động bằng chứng chỉ số, loại bỏ nhu cầu sử dụng thẻ RFID hoặc các tương tác thủ công. Giao thức sử dụng TLS và chữ ký số để đảm bảo quyền riêng tư và tính toàn vẹn của dữ liệu, bảo vệ chống lại truy cập trái phép hoặc giả mạo.
Hiện tại, ISO 15118 vẫn đang trong quá trình phát triển, với các tính năng và cải tiến mới được bổ sung, do đó việc sử dụng tiêu chuẩn này trong sản xuất xe điện (EV) còn hạn chế. Tuy nhiên, tiêu chuẩn này dự kiến sẽ trở thành chuẩn mực chung cho việc sạc EV và tích hợp lưới điện. Trong tương lai, tiêu chuẩn này có thể sẽ tích hợp sạc không dây và các tính năng quản lý năng lượng tiên tiến.
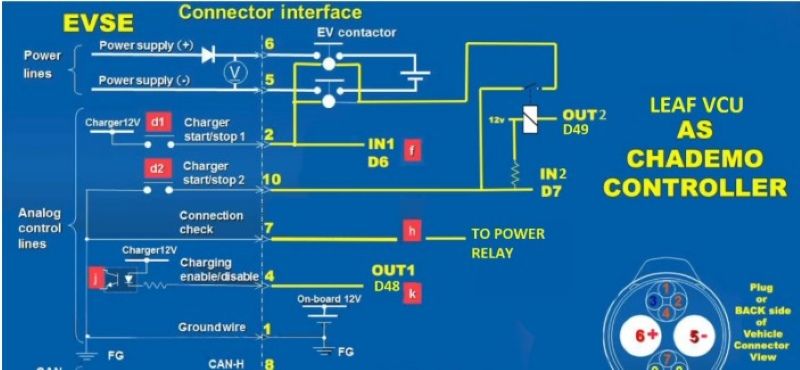
4. CHAdeMO
CHAdeMO, hay còn gọi là “CHArging deMO”, là một tiêu chuẩn sạc nhanh do Nhật Bản phát triển dành cho xe điện. CHAdeMO hỗ trợ sạc bằng dòng điện xoay chiều (AC) và dòng điện một chiều (DC), cho phép sạc xe nhanh chóng. So với việc sạc bằng dòng điện xoay chiều (AC) phổ biến tại các trạm sạc công cộng hoặc tại nhà, CHAdeMO sử dụng phương pháp sạc bằng dòng điện một chiều (DC) độc đáo, giúp sạc pin cực kỳ nhanh chóng.
Trong khi nhiều trạm sạc hiện đã hoạt động ở mức khoảng 50 kW, CHAdeMO có thể cung cấp tới 500 kW điện. Điều này có nghĩa là pin của xe điện có thể được sạc đầy 80% chỉ trong 30 phút thay vì 4 đến 8 giờ như sạc bằng nguồn AC thông thường. CHAdeMO là một tiêu chuẩn sạc nhanh và tích hợp khả năng V2G (xe-đến-lưới điện).
Tiêu chuẩn CHAdeMO đã được áp dụng rộng rãi tại Nhật Bản, Trung Quốc và Hàn Quốc. Tiêu chuẩn này đang phải đối mặt với sự cạnh tranh từ tiêu chuẩn CCS đã được thiết lập vững chắc ở Châu Âu và Bắc Mỹ. CHAdeMO khó có thể được áp dụng rộng rãi ở Bắc Mỹ. Tại Châu Âu, tiêu chuẩn này được thúc đẩy thông qua các quan hệ đối tác và các dự án thí điểm, nhưng CCS vẫn chiếm ưu thế.
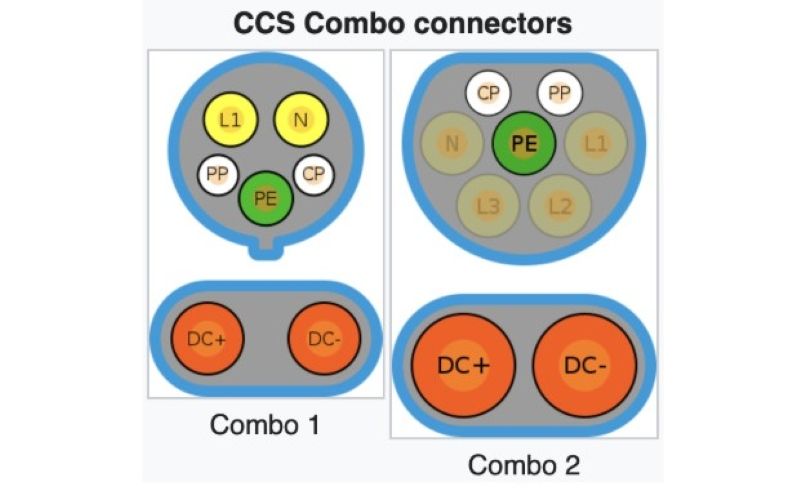
5. Hệ thống sạc kết hợp (CCS)
CCS là một giao thức sạc nhanh tiêu chuẩn phổ biến ở Bắc Mỹ và Châu Âu. Giao thức này sử dụng đầu nối hai cổng độc đáo để tương thích với cả phích cắm sạc AC và DC. Xe điện được trang bị CCS có thể kết nối với bất kỳ trạm sạc tương thích nào, bất kể công suất, hỗ trợ mức công suất từ 20 đến hơn 350 kW, tùy thuộc vào cách triển khai cụ thể. Mức công suất cao hơn giúp rút ngắn thời gian sạc và thiết lập cơ sở hạ tầng sạc siêu nhanh.
CCS dựa trên các giao thức truyền thông chuẩn hóa giữa xe điện và trạm sạc.
Các giao thức này bao gồm:
- ISO 15118 – dành cho truyền thông V2G
- IEC 61851 – dành cho giao tiếp trạm sạc
- Giao thức điểm sạc mở (OCPP) – để quản lý thông tin liên lạc giữa các trạm sạc và hệ thống quản lý trung tâm
- TCP/IP – để giao tiếp internet và trao đổi dữ liệu giữa EV và trạm sạc trong quá trình xác thực, thanh toán và giám sát
- WebSocket – để giao tiếp hai chiều giữa EV và trạm sạc
Cơ sở hạ tầng sạc AC hiện tại có thể được sử dụng với tiêu chuẩn CCS nhờ khả năng tương thích ngược. Điều này ngụ ý rằng các trạm sạc AC loại 2 vẫn tương thích với các xe được trang bị CCS. Khả năng tương thích ngược giúp việc chuyển đổi sang CCS dễ dàng hơn, cho phép tích hợp dần dần cơ sở hạ tầng sạc nhanh DC công suất cao.
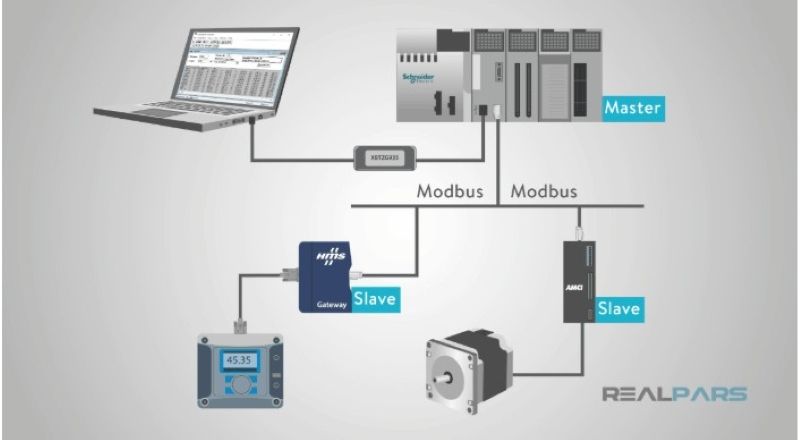
6. Mạng Modbus
Mạng Modbus là một giao thức truyền thông công nghiệp, ứng dụng của nó còn mở rộng sang cả xe điện (EV). Trong khi CANbus được sử dụng để truyền dữ liệu giữa các thành phần của xe, Modbus được sử dụng để truyền thông giữa các mô-đun cụ thể, chẳng hạn như bộ nguồn phụ, hệ thống làm mát hoặc bộ sưởi ắc quy.
Modbus cung cấp một giải pháp đơn giản, tiết kiệm chi phí để tích hợp các thành phần cũ với các hệ thống mới hơn. Giao thức này cung cấp một cách trực tiếp để truy cập và phân tích dữ liệu nhằm đánh giá hiệu suất và khắc phục sự cố. Nó được các kỹ sư ô tô sử dụng rộng rãi để kết nối thiết bị kiểm tra hoặc công cụ chẩn đoán với các thành phần cụ thể trong nguyên mẫu xe điện. Nhiều sửa đổi hoặc bổ sung hậu mãi cho xe điện (chẳng hạn như hệ thống sạc tùy chỉnh, đồng hồ đo giám sát pin hoặc công cụ chẩn đoán hiệu suất) cũng sử dụng Modbus để giao tiếp với các hệ thống hiện có của xe.
Một lợi ích của Modbus là khả năng giao tiếp đáng tin cậy trên khoảng cách xa. Máy kéo điện, thiết bị xây dựng hoặc xe tải hạng nặng có thể dựa vào Modbus để giao tiếp với các thiết bị bên ngoài như công cụ chẩn đoán, hệ thống quản lý sạc hoặc các phụ kiện chuyên dụng.
Nhìn chung, giao thức này chỉ đóng vai trò nhỏ trong xe điện so với bus CAN. Modbus chỉ giới hạn ở các linh kiện cũ, ứng dụng chuyên dụng, hoạt động nghiên cứu và phát triển (R&D) và các sửa đổi hậu mãi. CANbus vẫn là tiêu chuẩn phổ biến cho hầu hết các chức năng và giao tiếp nội bộ trong xe điện.
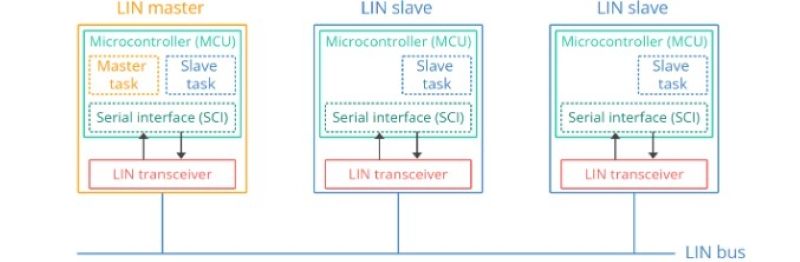
7. Mạng kết nối cục bộ (LIN)
LIN là một giao thức truyền thông đơn giản, chi phí thấp, dùng để trao đổi dữ liệu giữa các bộ vi điều khiển công suất thấp trong xe. Mặc dù CAN vẫn là tiêu chuẩn truyền thông chính cho xe điện (EV), LIN đóng vai trò hỗ trợ, đáp ứng các chức năng cơ bản và hệ thống cũ.
Trong xe hơi thông thường, LIN điều khiển khóa cửa, cửa sổ, gương, ghế ngồi và đèn nội thất, đồng thời gửi lệnh đến hệ thống sưởi, thông gió và điều hòa không khí. Cụm đồng hồ sử dụng LIN để truyền thông tin liên quan đến mức nhiên liệu, tốc độ, đèn cảnh báo và dữ liệu cảm biến cơ bản như nhiệt độ nước làm mát hoặc áp suất không khí. Trong xe điện, LIN có vai trò hạn chế.
Các mẫu xe điện (EV) cũ hơn sử dụng LIN để giao tiếp giữa các hệ thống con như điều khiển ghế ngồi, cơ cấu cửa sổ và hệ thống chiếu sáng nội thất. Vì giao thức này chỉ phù hợp cho các ứng dụng tốc độ thấp, nên nó được sử dụng bởi các hệ thống EV không quan trọng, chẳng hạn như bộ nguồn phụ, bộ sưởi pin hoặc giao tiếp cổng sạc.
LIN lý tưởng cho các tác vụ không yêu cầu giao tiếp thời gian thực. Một số tiện ích bổ sung hoặc sửa đổi hậu mãi cho xe điện, chẳng hạn như hệ thống chiếu sáng tùy chỉnh, đồng hồ đo giám sát pin hoặc công cụ chẩn đoán hiệu suất, cũng phụ thuộc vào LIN.
8. Ethernet
Ethernet là một công nghệ nổi bật trong mạng máy tính, ngày càng được ứng dụng rộng rãi trong xe điện (EV). Ethernet cung cấp băng thông cao hơn đáng kể so với bất kỳ giao thức ô tô nào, bao gồm cả CAN. Nó có khả năng xử lý khối lượng dữ liệu lớn nhanh hơn, khiến khả năng tốc độ cao và băng thông rộng trở nên lý tưởng cho xe điện.
ADAS sử dụng Ethernet để phân tích nhiều dữ liệu hơn theo thời gian thực, giúp lập bản đồ môi trường chính xác hơn và vận hành xe mượt mà hơn. Nó hỗ trợ trao đổi dữ liệu giữa camera, radar và các cảm biến khác, cho phép phản ứng tức thời để tránh va chạm, cảnh báo chệch làn đường và kiểm soát hành trình thích ứng. Ethernet hỗ trợ trao đổi dữ liệu giữa BMS, động cơ điện và các thành phần khác để phân tích tình trạng và hiệu suất pin theo thời gian thực, giúp tối đa hóa hiệu suất và giảm thiểu thời gian sạc.
Ethernet cũng hoạt động trong giao tiếp V2X (xe với mọi thứ). Nó cho phép giao tiếp giữa xe với xe và giữa xe với cơ sở hạ tầng, cho phép xe điện chia sẻ thông tin về tình trạng giao thông, trạm sạc và các mối nguy hiểm trên đường, tối ưu hóa lưu lượng giao thông và giảm thiểu tai nạn. Tiêu chuẩn này được sử dụng làm giao thức lớp vật lý trong giao tiếp V2G và sạc hai chiều.
Ethernet hỗ trợ cập nhật qua mạng không dây (OTA) cho nhiều hệ thống xe điện khác nhau. Nó cũng được sử dụng cho giao tiếp giữa xe và đám mây để chẩn đoán từ xa, cập nhật tình hình giao thông và ứng phó khẩn cấp. Điều này cho phép đánh giá hiệu suất xe điện theo thời gian thực và phát hiện sớm các vấn đề tiềm ẩn.
Giống như trên các phương tiện thông thường, Ethernet trong xe điện được sử dụng bởi các hệ thống thông tin giải trí để truyền phát video độ phân giải cao, kết nối internet nhanh hơn và cập nhật qua mạng. Mọi trao đổi dữ liệu tốc độ cao giữa BMS, động cơ điện và các thành phần khác trong xe điện và xe hybrid đều được quản lý bởi Ethernet.
9. Bluetooth & WIFI
Bluetooth và Wi-Fi là các giao thức không dây hỗ trợ giao tiếp giữa xe điện (EV) và các thiết bị ngoại vi như điện thoại thông minh. Bluetooth được sử dụng để mở cửa, khởi động xe không cần chìa khóa và khóa hoặc mở khóa xe từ xa. Nhiều máy quét OBD-II kết nối qua Bluetooth, cho phép truy cập thông tin cơ bản về tình trạng động cơ và ắc quy qua điện thoại hoặc máy tính bảng.
Bluetooth cũng kết nối điện thoại thông minh với xe để gọi điện thoại rảnh tay an toàn và tiện lợi khi lái xe. Nó cho phép truyền phát nhạc, podcast và sách nói từ điện thoại đến hệ thống âm thanh của xe.
Wi-Fi thường được sử dụng để tải xuống và cài đặt các bản cập nhật phần mềm (OTA) cho xe điện, đảm bảo quyền truy cập vào các tính năng mới nhất và bản sửa lỗi mà không cần đến đại lý. Nhờ Wi-Fi trên xe, hành khách có thể lướt web, xem phim và duy trì kết nối khi lái xe.
Các xe điện trong tương lai cũng có khả năng trao đổi dữ liệu với các phương tiện và cơ sở hạ tầng khác để cải thiện lưu lượng giao thông, các tính năng an toàn và tích hợp lưới điện.
10. Kết luận
Việc xe điện tham gia vào vào thị trường ô tô phụ thuộc rất nhiều vào các giao thức truyền thông hiệu quả và chuẩn hóa. Từ Mạng Khu vực Điều khiển (CAN) đến giao tiếp hai chiều tiên tiến của ISO 15118 và khả năng sạc công suất cao của CHAdeMO và CCS, tất cả các giao thức này cùng nhau góp phần vào sự vận hành và phát triển liền mạch của xe điện.
Khi công nghệ tiếp tục phát triển, vai trò của giao thức truyền thông trong xe điện chắc chắn sẽ mở rộng, nâng cao hơn nữa hiệu suất, khả năng tương tác và trải nghiệm lái xe tổng thể.
Trên đây là toàn bộ thông tin về chủ đề các giao thức truyền thông trên xe điện mà trung tâm VATC muốn gửi đến bạn. Hy vọng bài viết này sẽ bổ ích và hữu dụng với bạn.
Nếu bạn có đang đam mê hoặc muốn tìm hiểu về các khóa học trong ngành ô tô thì liên hệ ngay với trung tâm VATC theo thông tin dưới đây để được tư vấn chi tiết nhất nhé!
Trung Tâm Huấn Luyện Kỹ Thuật Ô Tô Việt Nam – VATC
- Địa chỉ: Số 4-6, Đường số 4, Phường Hiệp Bình Phước, Thành Phố Thủ Đức, Thành phố Hồ Chí Minh
- Điện thoại: 0945711717
- Email: info@oto.edu.vn
Xem thêm:


