
Hệ thống Bus trên BMW là hạ tầng giao tiếp giữa các ECU của động cơ, khung gầm, thân xe và giải trí. Bài viết trình bày các mạng chính (PT-CAN, K-CAN, LIN, FlexRay/Ethernet), vai trò Gateway, nguyên tắc truyền dữ liệu và các lỗi thường gặp để bạn nắm nền tảng chẩn đoán.
1. Giới thiệu
Trước khi dòng xe BMW E31 được giới thiệu, toàn bộ thông tin trao đổi giữa các bộ điều khiển trên xe đều được truyền qua các đường tín hiệu riêng biệt. Khi các hệ thống điện tử ngày càng phát triển và trở nên phức tạp, kích thước bó dây điện tăng lên nhanh chóng và vượt quá giới hạn thực tế.
Các tín hiệu như tốc độ vòng quay động cơ, nhiệt độ nước làm mát, vị trí bướm ga, tốc độ xe… mỗi tín hiệu đều yêu cầu một đường dây riêng dẫn đến các mô-đun điều khiển có nhu cầu sử dụng thông tin đó.
Mỗi đường dây lại sử dụng các phương pháp truyền tín hiệu khác nhau như: tín hiệu DC chuyển mạch, tín hiệu có tần số thay đổi hoặc tín hiệu điều chế theo chu kỳ làm việc. Điều này dẫn đến hệ thống dây dẫn ngày càng lớn, phức tạp và khó bảo trì.
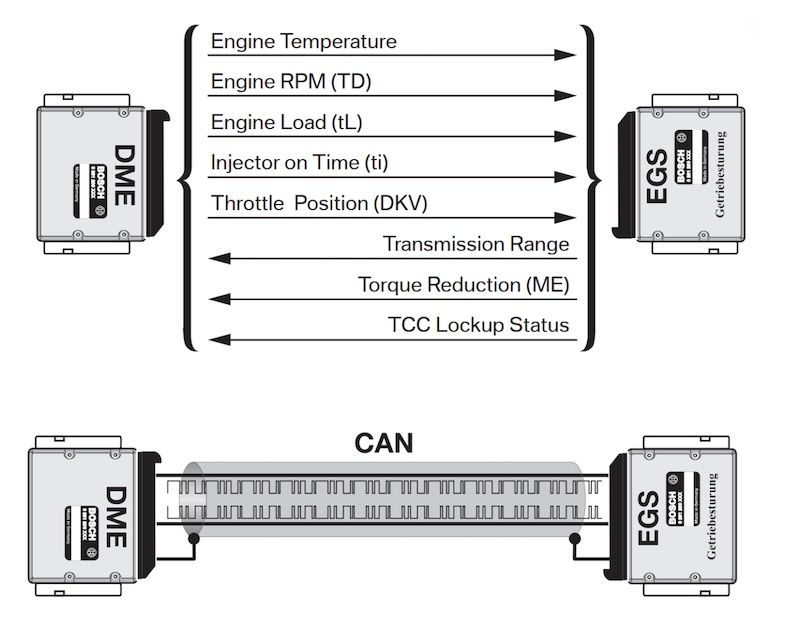
Để giải quyết vấn đề này, Tập đoàn BMW đã áp dụng mạng kết nối Bus trên các phương tiện của mình. Hệ thống Bus sử dụng công nghệ ghép kênh, tương tự như công nghệ được sử dụng trong ngành điện tử và viễn thông. Ghép kênh cho phép truyền nhiều thông điệp khác nhau trên cùng một mạch truyền.
Nhờ công nghệ này, các mô-đun điều khiển có thể trao đổi dữ liệu hai chiều với tốc độ cao, đồng thời chia sẻ thông tin cảm biến với nhau. Điều này giúp tăng tốc độ phản hồi của hệ thống và giảm đáng kể số lượng dây dẫn trên xe.
Các lợi ích chính của hệ thống Bus trên xe BMW bao gồm:
- Giảm kích thước bó dây điện bằng cách giảm số lượng dây kết nối giữa các mô-đun.
- Tăng độ tin cậy của hệ thống nhờ giảm số lượng đầu nối và linh kiện.
- Cho phép chia sẻ cảm biến giữa nhiều hệ thống.
- Giảm chi phí linh kiện, lắp ráp và chẩn đoán.
- Tăng tính linh hoạt khi mở rộng hoặc bổ sung hệ thống mới.
2. Nguyên lý ghép kênh
Ghép kênh dựa trên việc sử dụng giao tiếp kỹ thuật số giữa các đơn vị điều khiển. Một tín hiệu kỹ thuật số bao gồm một chuỗi các tín hiệu điện áp cao và thấp, đại diện cho các “bit” thông tin.
Sử dụng mã Morse làm ví dụ, tín hiệu SOS được biểu diễn bằng ba xung ngắn, ba xung dài và ba xung ngắn, tương ứng với ba dấu chấm – ba dấu gạch ngang – ba dấu chấm.
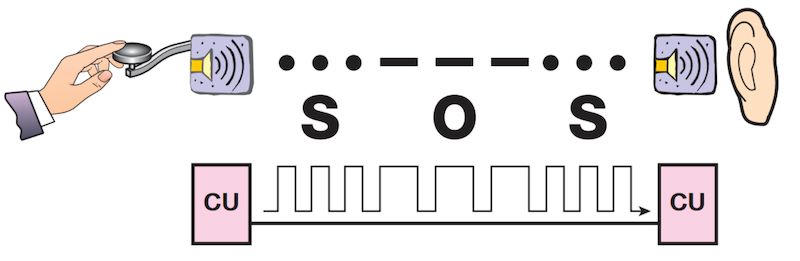
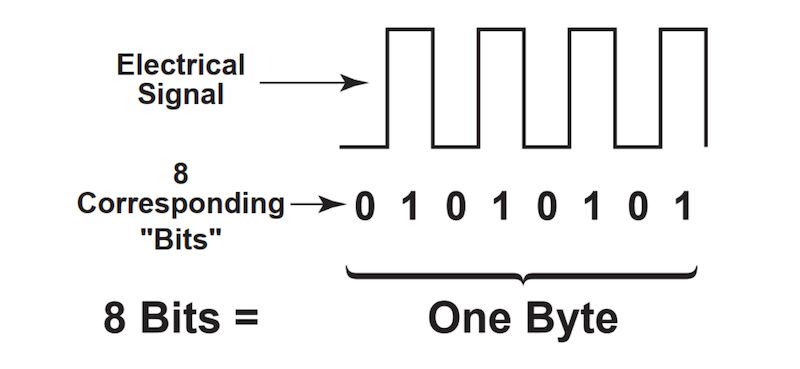
Cơ sở của truyền thông kỹ thuật số là mã nhị phân. Mã nhị phân chỉ sử dụng 2 chữ số 0 và 1. Về mặt điện, 1 được biểu diễn bằng một xung điện áp và 0 được biểu diễn bằng một tín hiệu điện áp thấp, thường là 0V.
Trong truyền thông kỹ thuật số, mỗi xung đại diện cho một “bit” dữ liệu. 8 “bit” thông tin trong một chuỗi xung tạo thành một “byte”. Một byte đại diện cho một ký tự trong một dòng thông tin (dữ liệu).
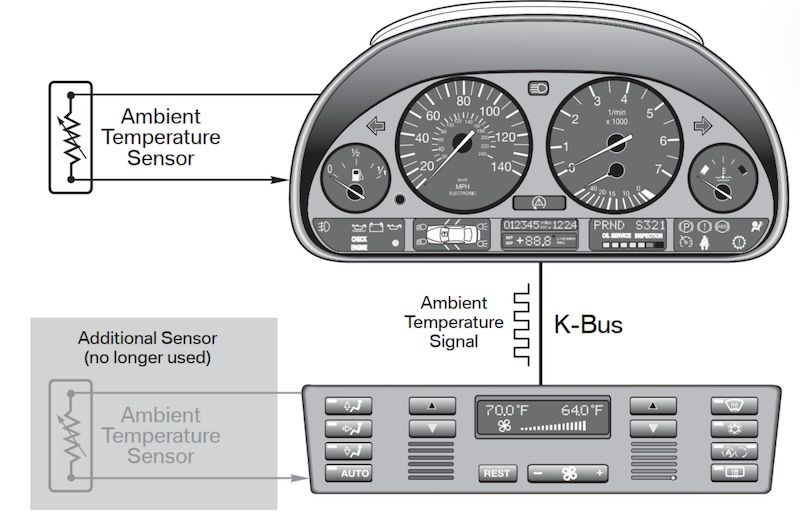
Để minh họa nguyên lý ghép kênh trong hệ thống điện ô tô, mạch K-Bus được sử dụng làm ví dụ. Hệ thống K-Bus (Body Bus) được giới thiệu lần đầu trên dòng xe BMW E38 và là một mạng truyền dữ liệu tốc độ thấp. Một trong những lợi ích quan trọng của nguyên lý ghép kênh là khả năng chia sẻ cảm biến giữa nhiều hệ thống.
Cảm biến nhiệt độ môi trường bên ngoài là một ví dụ điển hình cho việc chia sẻ thông tin cảm biến. Trong hệ thống này, cảm biến nhiệt độ môi trường được kết nối như một tín hiệu đầu vào tương tự của cụm đồng hồ. Thông tin nhiệt độ được cụm đồng hồ xử lý và sử dụng để hiển thị nhiệt độ bên ngoài cho người lái. Đồng thời, dữ liệu này cũng cần thiết cho hệ thống điều hòa không khí tự động (IHKA) để điều khiển nhiệt độ và các chức năng liên quan.
Trên các mẫu xe đời cũ, trước khi áp dụng hệ thống Bus, IHKA phải sử dụng một cảm biến nhiệt độ môi trường riêng để nhận tín hiệu. Khi áp dụng nguyên lý ghép kênh, thông tin nhiệt độ (cùng các dữ liệu liên quan) được truyền qua K-Bus từ cụm đồng hồ đến mô-đun IHKA, qua đó loại bỏ nhu cầu lắp thêm cảm biến riêng.
3. Tốc độ truyền thông trên Bus
Dữ liệu trong hệ thống truyền thông kỹ thuật số phải được truyền với tốc độ đủ cao để đảm bảo hoạt động hiệu quả. Tùy loại mạng Bus, tốc độ truyền có thể từ 9,6 kbps đến 500 kbps; riêng các hệ thống truyền thông cáp quang như MOST có thể đạt tới 22,5 Mbps.
Mỗi hệ thống trên xe có yêu cầu tốc độ khác nhau. Các hệ thống truyền động như điều khiển động cơ và hộp số cần tốc độ cao do dữ liệu thay đổi liên tục, vì vậy CAN-Bus (PT-CAN) được thiết kế để hoạt động lên đến 500 kbps. Đối với dữ liệu âm thanh và hình ảnh, MOST-Bus được sử dụng nhờ băng thông lớn.
Tốc độ truyền dữ liệu được biểu thị bằng bps (bit trên giây), không nên nhầm với tốc độ baud. Baud là số lần thay đổi trạng thái tín hiệu trong một giây và không nhất thiết tương ứng trực tiếp với số bit được truyền. Tám bit tạo thành một byte, và nhiều byte ghép lại tạo thành một thông điệp truyền trên Bus.
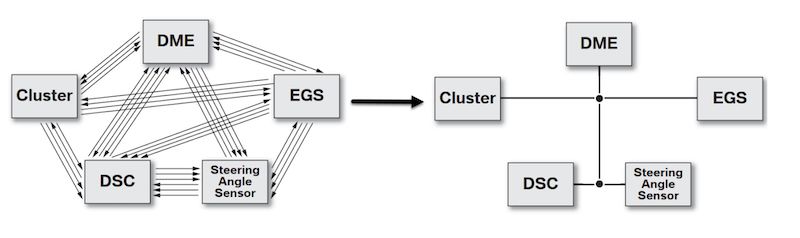
4. Cấu trúc hệ thống bus
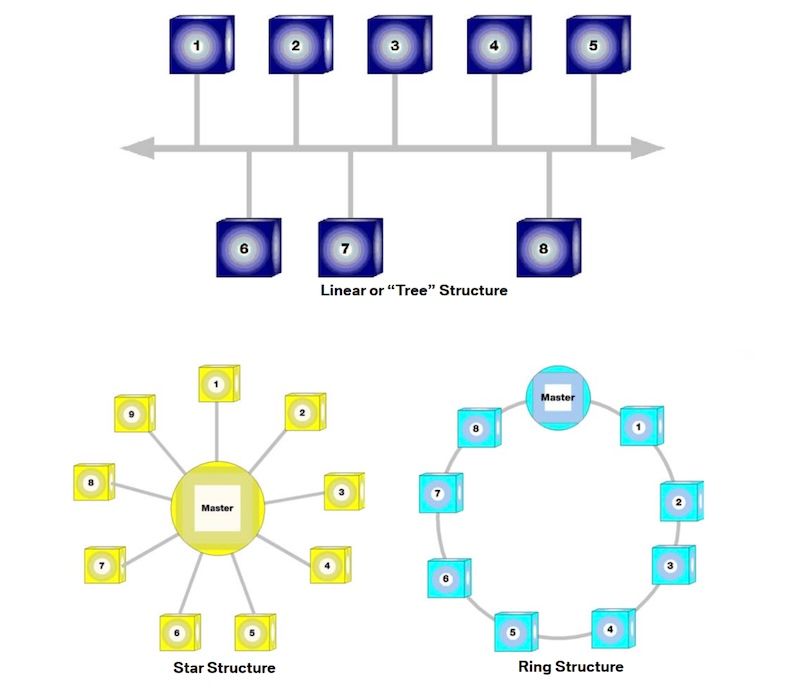
Có 3 cách bố trí cấu trúc hệ thống bus khả thi trong xe BMW. Đó là:
- Tuyến tính (hoặc cấu trúc cây)
- Vòng
- Sao
Cấu trúc bus tuyến tính là cách bố trí phổ biến nhất. Cho đến khi ra mắt E65, cấu trúc tuyến tính được sử dụng độc quyền. Hai cấu trúc bus khác hiện đang được sử dụng cho mạng cáp quang. Cấu trúc vòng được sử dụng trên MOST-Bus và cấu trúc sao được sử dụng trên hệ thống byteflight.
5. Hoạt động của CAN-Bus
Chức năng chính của CAN-Bus là trao đổi dữ liệu tốc độ cao giữa các mô-đun điều khiển. CAN-Bus sử dụng hai đường tín hiệu là CAN-High và CAN-Low, cả hai truyền cùng một dữ liệu tại cùng thời điểm dưới dạng tín hiệu vi sai, giúp tăng khả năng chống nhiễu và độ tin cậy.
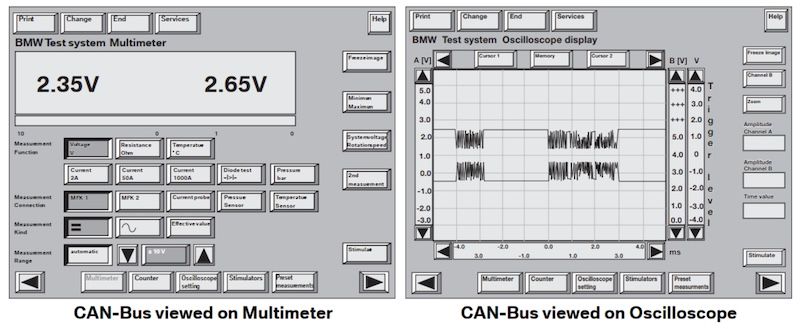
Điện áp trung bình trên CAN-Bus là khoảng 2,5 V, được đo từ mỗi đường tín hiệu so với mass. Mỗi mô-đun kết nối vào mạng CAN đều tham gia duy trì mức điện áp này.
Khi quan sát bằng máy hiện sóng:
- CAN-Low có mức cơ bản khoảng 2,5 V và sẽ bị kéo xuống thấp khi truyền dữ liệu.
- CAN-High cũng có mức cơ bản khoảng 2,5 V nhưng sẽ bị kéo lên cao khi truyền dữ liệu.
Lưu ý: Việc đo thấy điện áp khoảng 2,5 V trên CAN-Bus không có nghĩa là hệ thống không có lỗi, mà chỉ cho thấy mức điện áp nền đủ để hỗ trợ quá trình truyền dữ liệu.
6. Điện trở đầu cuối CAN-Bus
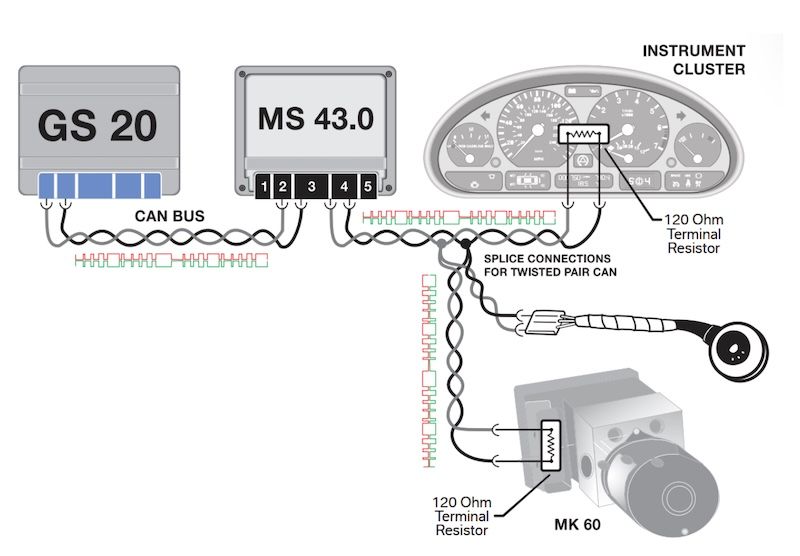
CAN-Bus sử dụng hai điện trở đầu cuối 120 Ω mắc giữa CAN-High và CAN-Low để thiết lập trở kháng chính xác và đảm bảo đường truyền ổn định. Do hai điện trở mắc song song, điện trở tổng của mạng CAN là 60 Ω.
Điện trở CAN-Bus được kiểm tra bằng cách đo điện trở giữa CAN-H và CAN-L tại bất kỳ mô-đun nào trên mạng. Giá trị đo được phải xấp xỉ 60 Ω. CAN-Bus vẫn có thể hoạt động nếu điện trở không hoàn toàn chính xác, nhưng có thể xuất hiện lỗi giao tiếp không ổn định.
Trên xe BMW, các điện trở đầu cuối thường nằm trong ASC/DSC và cụm đồng hồ hoặc DME. Một số xe đời cũ (ví dụ 750iL) sử dụng đầu nối hình sao với điện trở ngoài riêng.
Các mô-đun không có điện trở đầu cuối có thể được kiểm tra bằng cách ngắt kết nối và đo điện trở trực tiếp giữa chân CAN-H và CAN-L; giá trị thường nằm trong khoảng 10 kΩ đến 50 kΩ.
7. Giao thức truyền thông CAN
CAN là giao thức truyền thông dựa trên mã định danh. Thông điệp CAN không được gửi trực tiếp đến một mô-đun điều khiển cụ thể mà được phát lên toàn bộ mạng CAN. Tất cả các mô-đun kết nối trên mạng đều nhận được thông điệp và chỉ xử lý những thông điệp có mã định danh phù hợp với chức năng của mình, các thông điệp còn lại sẽ bị bỏ qua.
Mỗi thông điệp CAN có một mã định danh duy nhất trong toàn mạng, mã định danh này đồng thời xác định mức độ ưu tiên truyền dữ liệu. Khi nhiều mô-đun cùng cố gắng truyền thông điệp trên bus trống, thông điệp có mức ưu tiên cao hơn sẽ được truyền trước.
Giao thức CAN đảm bảo độ tin cậy của truyền thông bằng cách lưu trữ các thông điệp chưa được truyền và tự động truyền lại khi bus sẵn sàng, nhờ đó tránh mất dữ liệu trong quá trình truyền thông.
Trên đây là toàn bộ thông tin về hệ thống Bus trên ô tô BMW mà trung tâm VATC muốn gửi đến bạn. Hy vọng bài viết này sẽ bổ ích và hữu dụng với bạn!
Nếu bạn có đang đam mê hoặc muốn tìm hiểu về các khóa học trong ngành ô tô thì liên hệ ngay với trung tâm VATC theo thông tin dưới đây để được tư vấn chi tiết nhất nhé!
Trung Tâm Huấn Luyện Kỹ Thuật Ô Tô Việt Nam – VATC
- Địa chỉ: Số 4-6, Đường số 4, Phường Hiệp Bình Phước, Thành Phố Thủ Đức, Thành phố Hồ Chí Minh
- Điện thoại: 0945711717
- Email: info@oto.edu.vn
Xem thêm:


