
Hệ thống hỗ trợ đỗ xe an toàn kết hợp cảm biến siêu âm, camera và ECU để phát hiện chỗ trống, tự động hỗ trợ đánh lái, cảnh báo vật cản. Bài viết trình bày cấu tạo, nguyên lý, quy trình vận hành và lưu ý sử dụng.
1. Miêu tả hệ thống
Hệ thống hỗ trợ đỗ xe phía sau (RPAS) là một thiết bị hỗ trợ lái xe điện tử, cảnh báo người lái khi đỗ xe hoặc di chuyển với tốc độ thấp khi phát hiện có vật cản ở phía sau và bên hông xe bằng cách sử dụng sóng siêu âm.
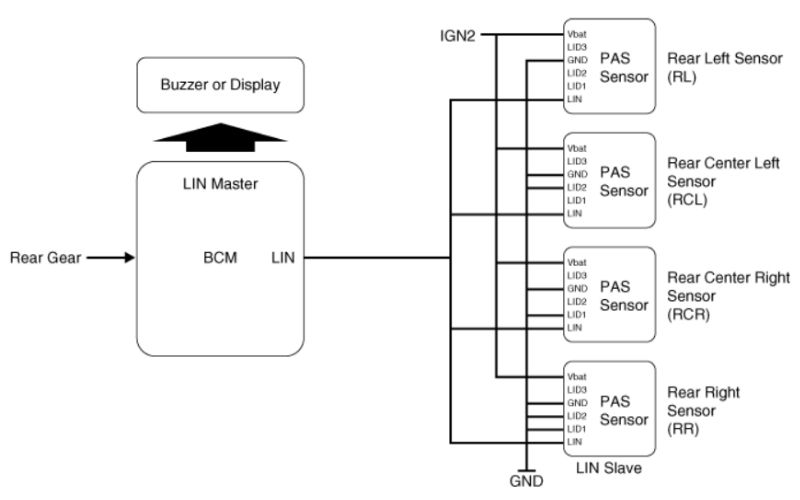
RPAS bao gồm bốn cảm biến RPS, có chức năng phát hiện chướng ngại vật và truyền kết quả được chia thành ba mức cảnh báo: mức đầu tiên, mức thứ hai và mức thứ ba đến BCM thông qua giao tiếp Lin.
BCM quyết định mức cảnh báo dựa trên thông điệp giao tiếp được truyền từ các cảm biến phụ, sau đó kích hoạt còi báo hoặc truyền dữ liệu để hiển thị.
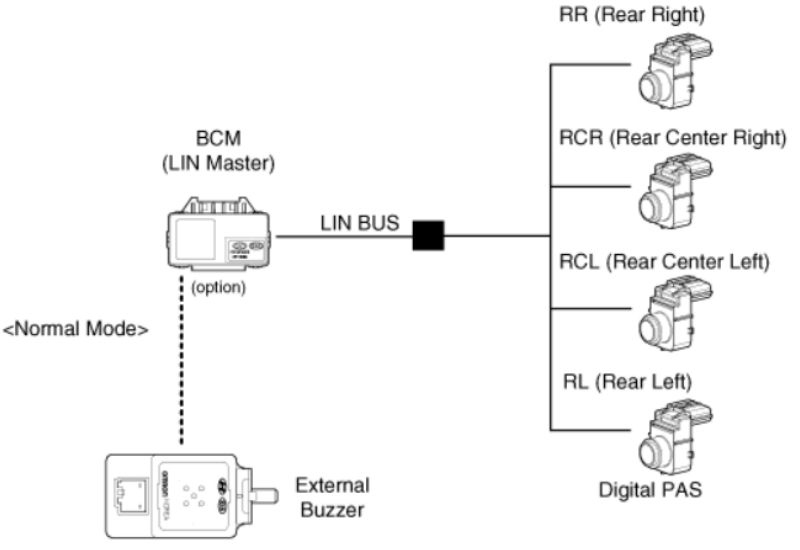
1.1. Sơ đồ khối hệ thống
1.2. Nguyên lý hoạt động của hệ thống
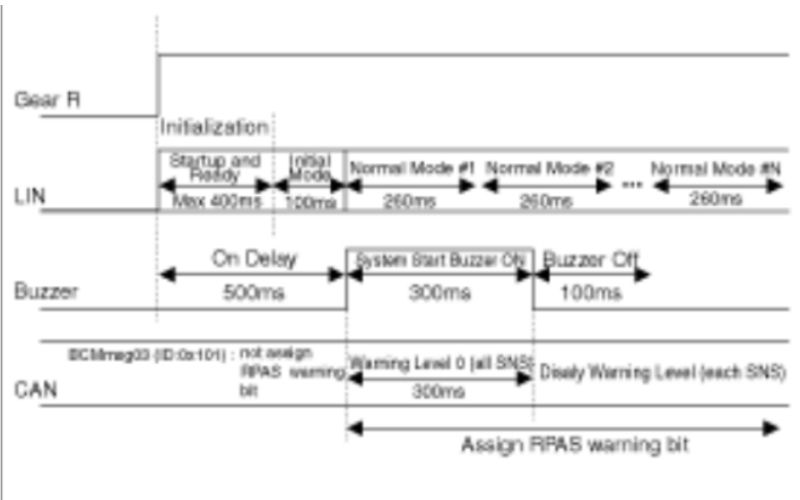
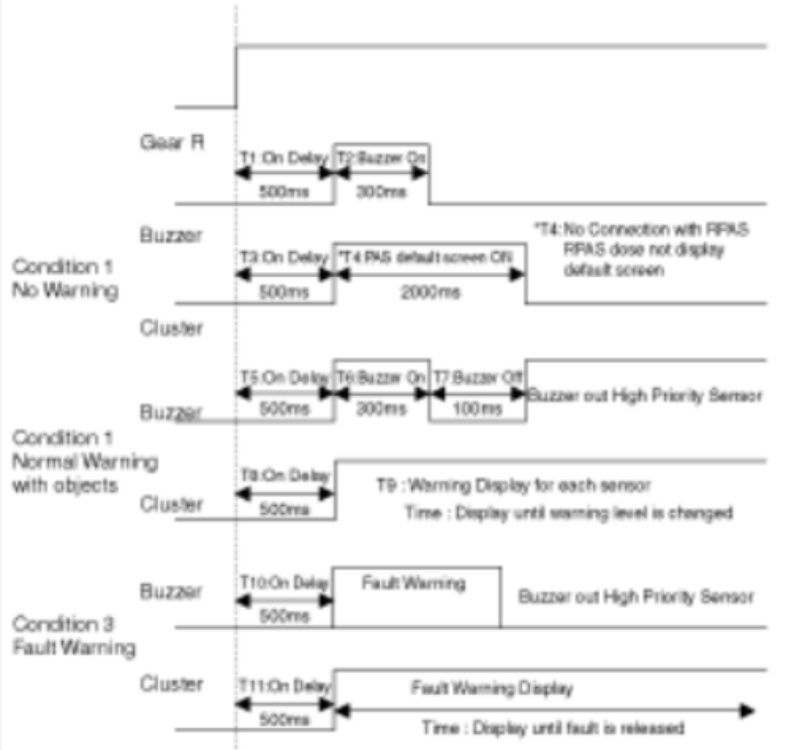
1.2.1. INITIALIZATION Mode
- Thời gian khởi tạo hệ thống là 500ms sau khi bật IGN1+ và vào số lùi (R Gear).
- RPAS nhận diện LID và cài đặt mã cảm biến trong quá trình khởi tạo.
- RPAS kích hoạt từng cảm biến và sau đó thực hiện chẩn đoán sau khi hoàn tất khởi tạo BCM.
- “Còi báo khởi động R-PAS” hoạt động bình thường khi cảm biến không gửi thông báo lỗi và sau khi hoàn tất chẩn đoán lỗi.
- Nếu nhận được thông tin lỗi từ bất kỳ cảm biến nào, “Còi báo khởi động R-PAS” sẽ không hoạt động nhưng còi báo lỗi sẽ kêu trong một khoảng thời gian ngắn. Nếu bạn có tùy chọn màn hình hiển thị, ký hiệu cảnh báo cũng sẽ được hiển thị trên đó.
- Còi báo lỗi của cảm biến chỉ kêu một lần, nhưng thông báo lỗi trên màn hình sẽ được hiển thị liên tục cho đến khi lỗi được sửa chữa hoàn toàn.
1.2.2 NORMAL Mode
- Giao tiếp LIN bắt đầu và duy trì liên tục sau khi bật IGN1 và vào số lùi (R gear).
- BCM gửi một thông báo đến mỗi cảm biến để yêu cầu hoạt động nhằm kiểm tra trạng thái khởi tạo của hệ thống, và cả bốn cảm biến phản hồi cùng một lúc. Tại thời điểm này, nếu không có vấn đề gì, còi báo sẽ bắt đầu sau 500ms khi chuyển sang số lùi, với khoảng thời gian 300ms giữa các tiếng còi.
- Sau khi khởi tạo, chế độ bình thường bắt đầu sau 100ms khi kết thúc tín hiệu báo động.
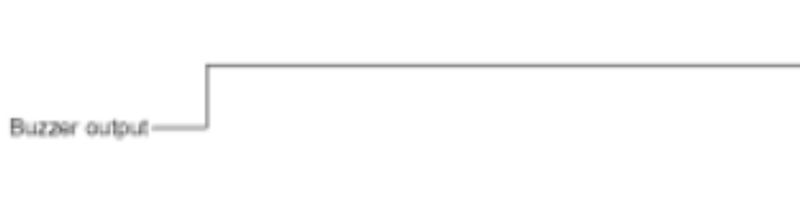
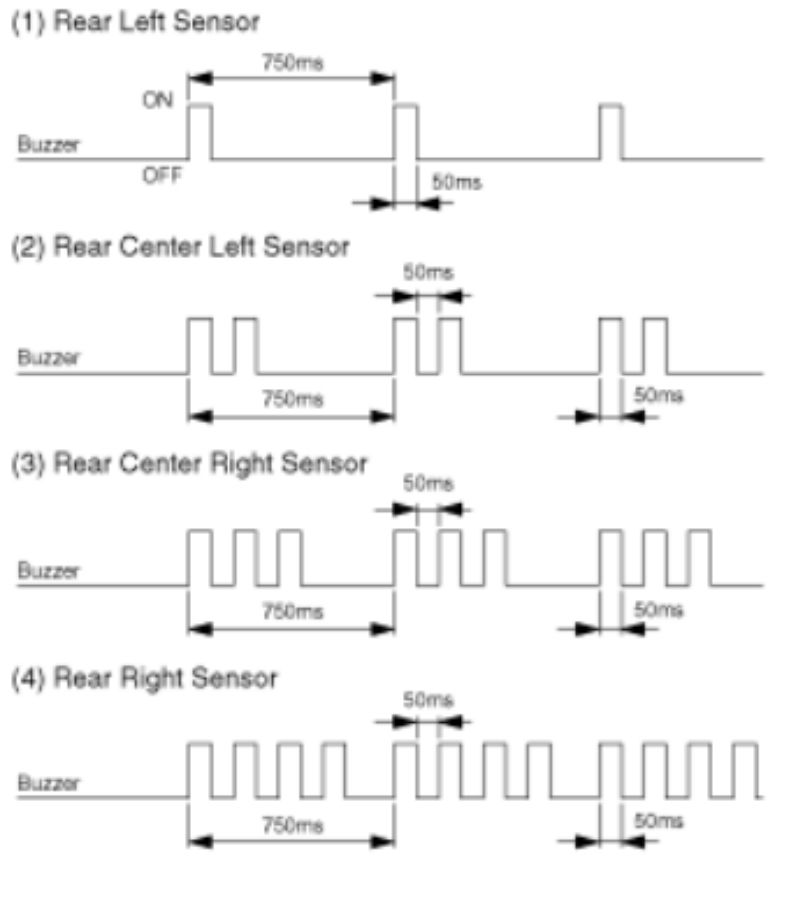
- Còi báo chướng ngại vật được chia thành 3 cấp độ. Cấp độ thứ nhất và thứ hai là âm thanh ngắt quãng, còn cấp độ thứ ba là âm thanh liên tục.
- Tốc độ xe hiệu quả để RPAS hoạt động là dưới 10Km/h.
- Tham khảo tài liệu “Digital PAS Project LIN communication” để biết thêm chi tiết về thông số giao tiếp.
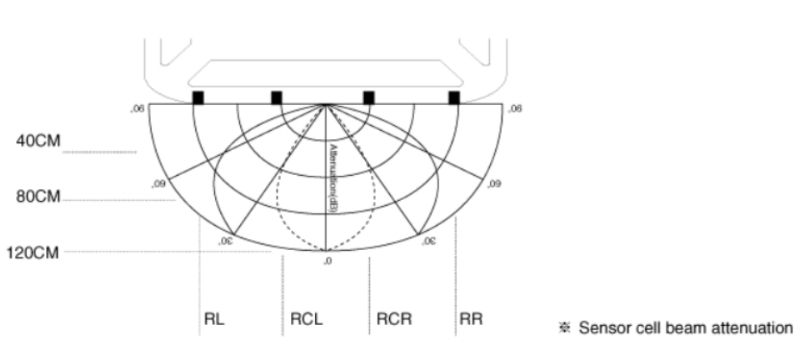
1.3. Khu vực đo của cảm biến
- Điều kiện đo lường – Cột PVC (đường kính 75mm, chiều dài 3m), nhiệt độ bình thường
- Khoảng cách phát hiện vật thể (Đo trực tiếp phía trước cảm biến)
- 81cm (31.9in) ~ 120cm (47.2in) : ± 15cm (5.9in)
- 41cm (16.1in) ~ 80cm (31.5in) : ± 15cm (5.9in)
- Dưới 40cm (15.7in) : ± 10cm (3.9in)
Khu vực đo phương ngang:
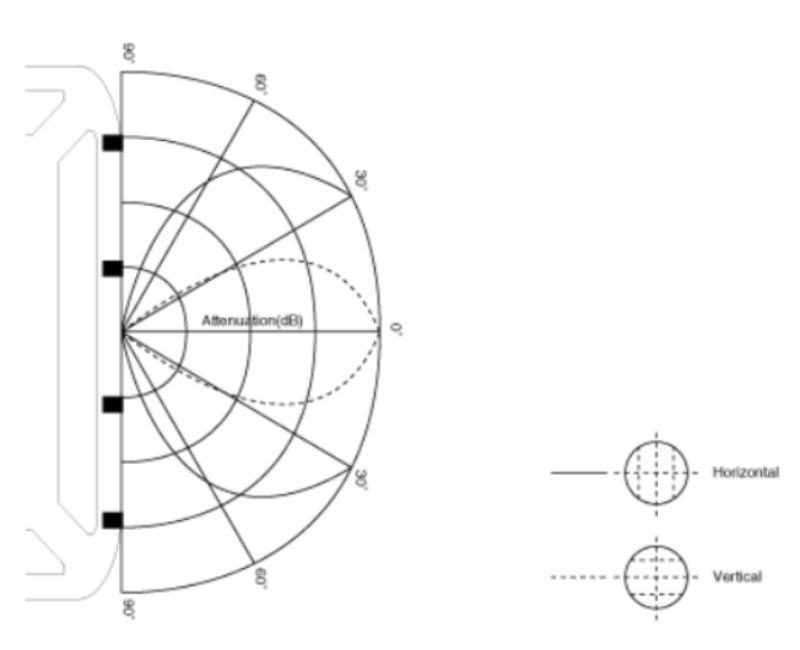
Khu vực đo phương thẳng đứng:
1.4. Khoảng cách đo của cảm biến
1.4.1 Đo trực tiếp từ 1 con cảm biến
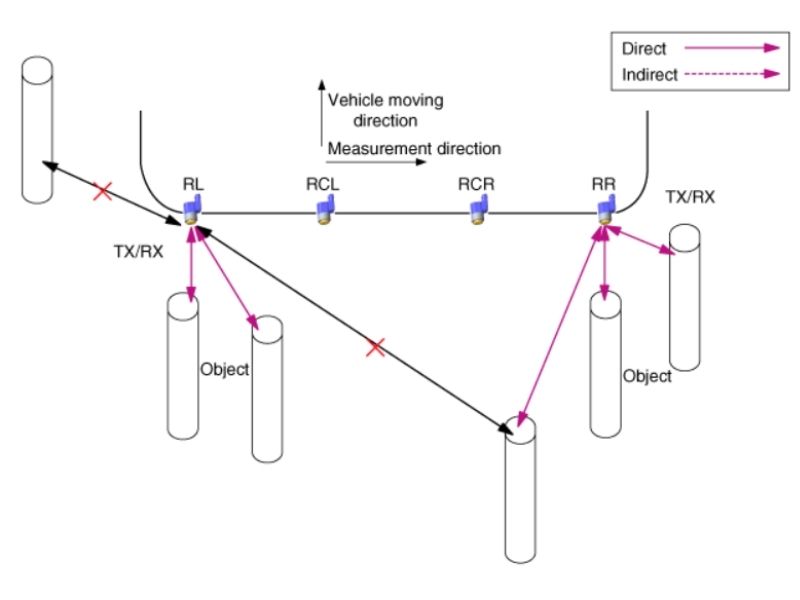
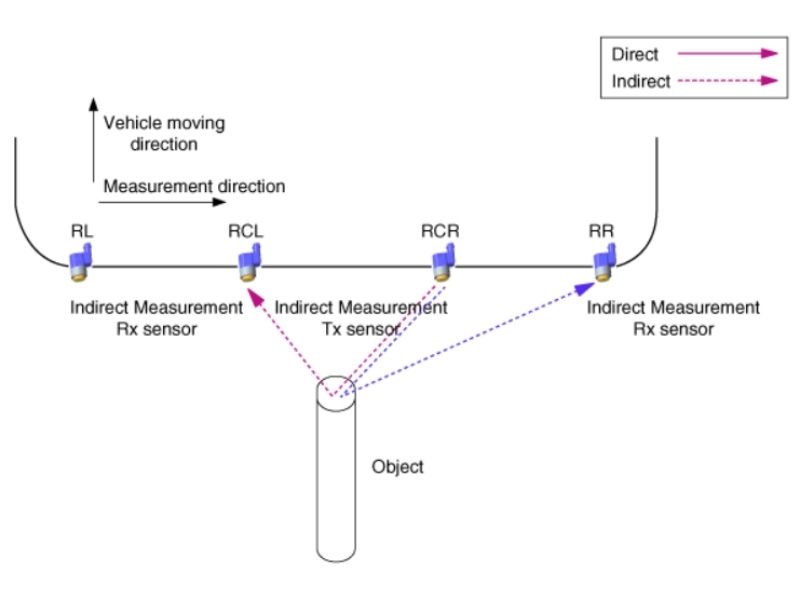
1.4.2 Đo gián tiếp thông qua cảm biến khác
Với hai hoặc ba cảm biến, một trong số chúng thực hiện việc truyền tín hiệu và các cảm biến còn lại tiếp nhận tín hiệu.
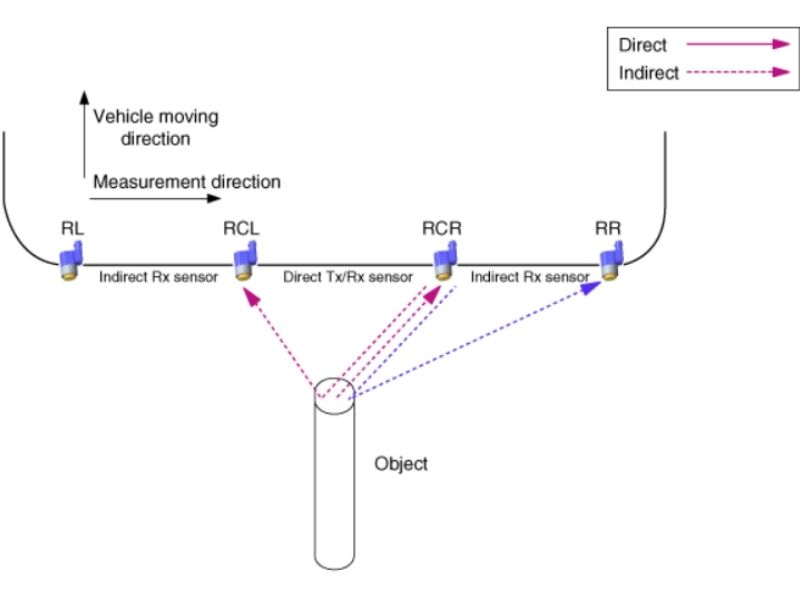
1.4.3 Đo trực tiếp và gián tiếp đồng thời
Với hai hoặc ba cảm biến, một cảm biến thực hiện cả việc truyền và nhận tín hiệu, trong khi các cảm biến còn lại chỉ thực hiện việc tiếp nhận tín hiệu.
1.5. Hệ thống cảnh báo có vật cản
Khi cảm biến RPAS phát hiện vật cản, cảnh báo sẽ được kích hoạt qua thiết bị âm thanh như còi. Cảm biến RPAS gửi dữ liệu đến BCM qua giao tiếp LIN, và BCM thực hiện cảnh báo âm thanh cho từng cảm biến RPAS theo mức ưu tiên. BCM chỉ đóng vai trò là cổng kết nối khi gửi cảnh báo hình ảnh đến các thiết bị như Cluster.
- Phương pháp xử lý thông tin còi/bảng hiển thị của BCM: Đối với thông tin từ cảm biến RL/RR, BCM xử lý trực tiếp thông tin của từng cảm biến liên quan đến chức năng hiển thị và đầu ra còi. Đối với đầu ra còi của cảm biến CL/CR, BCM xử lý thông tin kết hợp từ cả hai cảm biến theo mức ưu tiên.
Nguyên lý hoạt động của hệ thống:
Khi hệ thống được cấp nguồn (sau khi bật IGN và vào số lùi), MICOM kiểm tra tất cả các kênh cảm biến. Nếu không phát hiện lỗi nào, nó phát ra âm thanh còi trong 300ms sau đó, sau 500ms. Tuy nhiên, nếu phát hiện bất kỳ lỗi nào từ một cảm biến, còi sẽ phát ra âm thanh tương ứng với cảm biến lỗi thay vì âm thanh báo động khởi đầu. Chức năng để vào chế độ bình thường như sau:
- Khởi tạo và Kiểm tra: Sau khi bật IGN và vào số lùi, MICOM thực hiện kiểm tra toàn bộ các kênh cảm biến để xác định tình trạng hoạt động của chúng.
- Không có lỗi: Nếu tất cả các cảm biến hoạt động bình thường và không phát hiện lỗi, hệ thống sẽ phát ra âm thanh còi trong 300ms sau 500ms để báo hiệu trạng thái sẵn sàng của hệ thống.
- Có lỗi: Nếu có lỗi được phát hiện từ một hoặc nhiều cảm biến, còi sẽ phát ra âm thanh cảnh báo tương ứng với cảm biến bị lỗi thay vì âm thanh báo động khởi đầu.
- Vào chế độ bình thường: Sau khi xử lý các lỗi (nếu có) và khi hệ thống không còn lỗi, MICOM sẽ vào chế độ bình thường.
- Chế độ bình thường: Trong chế độ bình thường, hệ thống sẽ tiếp tục hoạt động với các cảm biến, cung cấp cảnh báo khi phát hiện vật cản dựa trên các mức ưu tiên đã được thiết lập.
Chức năng này đảm bảo rằng hệ thống chỉ hoạt động ở trạng thái bình thường khi tất cả các cảm biến đều hoạt động đúng cách và không có lỗi.
Khi vào số lùi (R Gear), chức năng của hệ thống như sau:
- Khởi tạo hệ thống:
- Khi số lùi được vào và nguồn được cấp (sau khi bật IGN), hệ thống sẽ bắt đầu quá trình khởi tạo.
- MICOM kiểm tra tất cả các kênh cảm biến để xác định tình trạng hoạt động của chúng.
- Kiểm tra cảm biến:
- Không phát hiện lỗi: Nếu không có lỗi nào từ các cảm biến, hệ thống sẽ phát ra âm thanh còi cảnh báo trong 300ms sau 500ms để báo hiệu rằng hệ thống đã sẵn sàng hoạt động.
- Phát hiện lỗi: Nếu có lỗi từ một hoặc nhiều cảm biến, còi sẽ phát ra âm thanh cảnh báo tương ứng với cảm biến bị lỗi thay vì âm thanh báo động khởi đầu.
- Quản lý cảnh báo:
- Còi báo động khởi đầu: Nếu không phát hiện lỗi, hệ thống sẽ phát ra âm thanh còi cảnh báo để xác nhận trạng thái hoạt động bình thường.
- Cảnh báo lỗi: Nếu có lỗi, còi sẽ phát ra âm thanh cảnh báo tương ứng với cảm biến gặp lỗi.
- Chế độ bình thường:
- Sau khi xử lý tất cả các lỗi và không còn lỗi nào, hệ thống sẽ vào chế độ bình thường.
- Trong chế độ bình thường, hệ thống sẽ cung cấp cảnh báo cho người lái dựa trên việc phát hiện vật cản, với các mức cảnh báo được xác định theo khoảng cách từ vật cản.
- Hoạt động liên tục:
- Hệ thống sẽ tiếp tục hoạt động trong khi số lùi được giữ và xe di chuyển với tốc độ dưới ngưỡng quy định (thường dưới 10 km/h).
- Cảm biến sẽ liên tục gửi dữ liệu về BCM để xử lý và cung cấp các cảnh báo âm thanh hoặc hình ảnh khi phát hiện vật cản.
- Kết thúc chế độ số lùi:
- Khi xe được đưa ra khỏi số lùi, hệ thống sẽ tự động tắt hoặc chuyển sang trạng thái chờ, tùy theo thiết kế của hệ thống.
Chức năng này đảm bảo rằng hệ thống RPAS hoạt động chính xác và cung cấp cảnh báo hiệu quả khi xe đang lùi, giúp lái xe tránh va chạm với các chướng ngại vật.
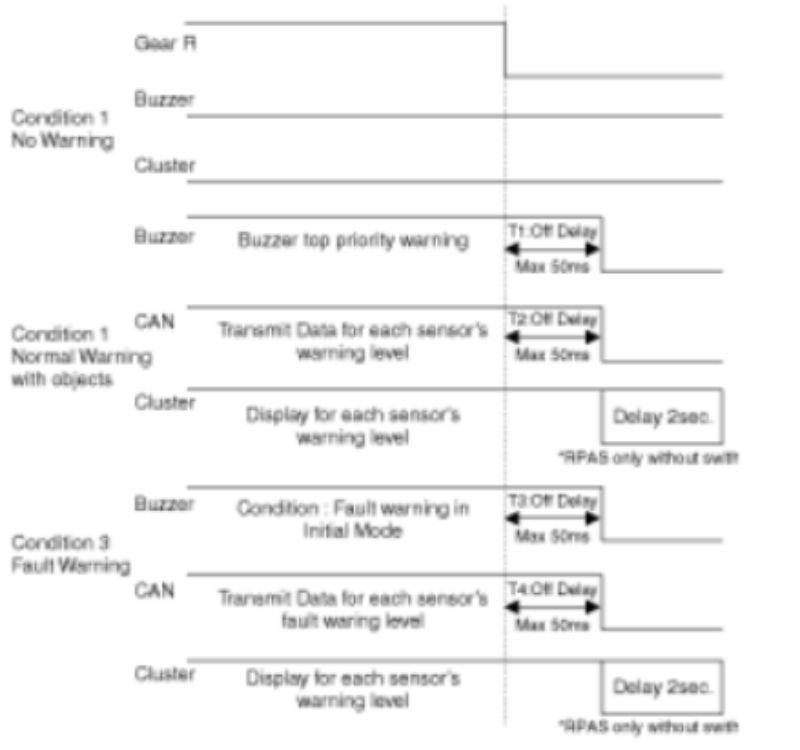
Khi thả số lùi (R gear), chức năng của hệ thống như sau:
- Xác định trạng thái:
- Khi thả số lùi, hệ thống sẽ nhận tín hiệu để bắt đầu quy trình tắt hoặc chuyển đổi chế độ.
- Tắt cảnh báo:
- Còi báo động: Nếu hệ thống đang phát ra còi báo động (do lỗi cảm biến hoặc cảnh báo vật cản), còi sẽ ngừng hoạt động ngay khi số lùi được thả.
- Cảnh báo hình ảnh: Nếu có bất kỳ cảnh báo hình ảnh nào hiển thị trên màn hình, chúng sẽ được tắt hoặc ẩn đi.
- Tắt chế độ số lùi:
- Hệ thống sẽ ngừng việc phát hiện vật cản và cung cấp cảnh báo khi xe không còn ở chế độ số lùi.
- Các cảm biến sẽ ngừng gửi dữ liệu liên tục đến BCM liên quan đến chế độ số lùi.
- Chuyển sang chế độ chờ:
- Sau khi số lùi được thả, hệ thống sẽ chuyển sang chế độ chờ hoặc ngừng hoạt động, tùy thuộc vào thiết kế của hệ thống.
- Nếu có chức năng chờ, hệ thống có thể giữ trạng thái để sẵn sàng hoạt động lại khi số lùi được kích hoạt lại.
- Kiểm tra và ghi nhận lỗi:
- Nếu trong quá trình thả số lùi có lỗi xảy ra hoặc cảm biến gặp sự cố, hệ thống có thể ghi nhận lỗi để cung cấp thông tin cho việc bảo trì hoặc kiểm tra sau này.
- Tùy thuộc vào thiết kế, lỗi có thể được lưu lại trong bộ nhớ hệ thống hoặc báo cáo qua giao diện người dùng.
- Kết thúc hoạt động:
- Khi số lùi được thả và xe tiếp tục di chuyển bình thường, hệ thống sẽ không còn cung cấp các cảnh báo liên quan đến việc lùi xe.
- Hệ thống sẽ chuẩn bị cho các chức năng khác khi xe di chuyển hoặc khi các chế độ khác được kích hoạt.
Chức năng này đảm bảo rằng hệ thống RPAS ngừng hoạt động khi không còn cần thiết và sẵn sàng hoạt động trở lại khi số lùi được kích hoạt.
1.6. Tín hiệu điều khiển còi dựa vào khoảng cách vật thể
Định nghĩa giá trị α
- Cảm biến ưu tiên thấp tắt: α = 0ms
- Cảm biến ưu tiên thấp ở mức cảnh báo 1: α < 340ms
- Cảm biến ưu tiên thấp ở mức cảnh báo 2: α < 170ms
Định nghĩa giá trị β
- Cảm biến ưu tiên thấp ở mức cảnh báo 1: β = 1700ms
- Cảm biến ưu tiên thấp ở mức cảnh báo 2: β = 1700ms
- Cảm biến ưu tiên thấp ở mức cảnh báo 3: β = 700ms
1.6.1 Khu vực cảnh báo đầu tiên (81cm ~ 120cm)
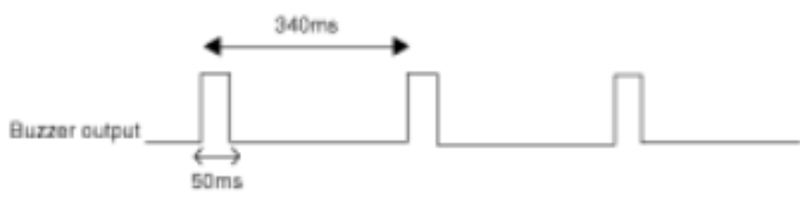
1.6.2 Khu vực cảnh báo cấp 2 (41cm ~ 80cm)

1.6.3 Khu vực cảnh báo cấp 3 (<40cm)
1.6.4 Cảnh báo hệ thống có lỗi
- Có màn hình hiển thị:

- Không có màn hình hiển thị:


Khi hệ thống phát hiện lỗi kênh trong thời gian khởi tạo, kênh cảm biến sẽ thông báo vị trí lỗi qua thiết bị âm thanh. Cụ thể:
- Thông báo lỗi: Mỗi cảm biến sẽ phát ra âm thanh ba lần để chỉ ra vị trí của lỗi.
- Số lần thông báo: Ba lần cho mỗi cảm biến lỗi để đảm bảo người dùng nhận diện chính xác vị trí gặp sự cố.
2. Vị trí chi tiết hệ thống
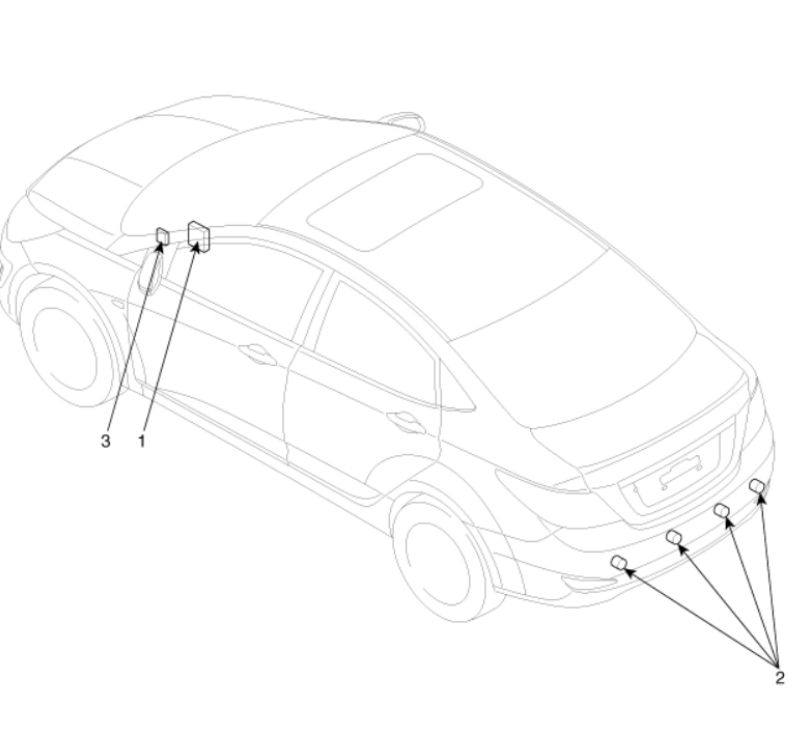
- BCM
- Cảm biến siêu âm
- Còi báo
3. Thông số kỹ thuật
|
Bộ phận |
Thông số kỹ thuật |
|
| Cảm biến siêu âm | Nguồn |
DC 12 V |
| Khoảng cách đo |
30 cm ~ 120 cm |
|
| Điện áp hoạt động |
DC 9 ~ 16 V |
|
| Dòng điện hoạt động |
MAX 300 mA |
|
| Nhiệt độ hoạt động |
-30°C ~ +80°C (-22°C ~ +176°C) |
|
| Tầng số hoạt động |
48 ± 5 KHz |
|
| Số lượng cảm biến |
4 (Left side, Left center, Right center, Right side) |
|
| Còi báo | Nguồn |
DC 12 V |
| Nguồn hoạt động |
DC 9 ~ 16 V |
|
| Nhiệt độ hoạt động | -30°C ~ +80°C (-22°C ~ +176°C) | |
| Dòng điện hoạt động |
Thấp hơn MAX 60 mA |
|
| Độ cao aamt hanh |
Tần số : 2,000 ± 500 Hz |
|
|
Biên độ âm thanh : Min : 65 dB (DC 13V /m, 1m) |
||
Trên đây là toàn bộ thông tin về hệ thống hỗ trợ đỗ xe an toàn mà trung tâm VATC muốn gửi đến bạn. Hy vọng bài viết này sẽ bổ ích và hữu dụng với bạn.
Nếu bạn có đang đam mê hoặc muốn tìm hiểu về các khóa học trong ngành ô tô thì liên hệ ngay với trung tâm VATC theo thông tin dưới đây để được tư vấn chi tiết nhất nhé!
Trung Tâm Huấn Luyện Kỹ Thuật Ô Tô Việt Nam – VATC
- Địa chỉ: Số 4-6, Đường số 4, Phường Hiệp Bình Phước, Thành Phố Thủ Đức, Thành phố Hồ Chí Minh
- Điện thoại: 0945711717
- Email: info@oto.edu.vn
Xem thêm:


