
Hệ thống mạng CAN BUS trên Audi là hạ tầng giao tiếp chính giữa các ECU (động cơ, ABS/ESP, tiện nghi, infotainment) thông qua Gateway. Bài viết trình bày kiến trúc bus (Powertrain/Drive CAN, Convenience CAN, Infotainment), tốc độ truyền 125–500 kbps, chuẩn chẩn đoán UDS/OBD-II, cách đọc sơ đồ topo, kiểm điện trở kết thúc 60 Ω, và nhận biết lỗi thường gặp: bus-off, chập mass/nguồn, đứt đường truyền, sai cấu hình mã hóa.

1. Giới thiệu chung
Hệ thống CAN (Controller Area Network) là hệ thống truyền dữ liệu nối tiếp được sử dụng rộng rãi trên ô tô hiện đại nhằm kết nối các bộ điều khiển điện tử thành một mạng thống nhất.
Trong các thế hệ xe đời cũ, mỗi hệ thống như động cơ, phanh, chiếu sáng hay bảng đồng hồ thường sử dụng các đường dây riêng biệt để truyền tín hiệu. Cách thiết kế này khiến số lượng dây dẫn tăng lên rất lớn, hệ thống điện trở nên cồng kềnh, khó bố trí, dễ phát sinh lỗi tiếp xúc và gây nhiều khó khăn trong công tác sửa chữa.
Khi điện tử ô tô phát triển, số lượng các hộp điều khiển trên xe tăng lên, đồng thời nhu cầu trao đổi dữ liệu giữa các hệ thống cũng trở nên phức tạp hơn. Ví dụ, thông tin tốc độ xe không chỉ cần cho bảng đồng hồ mà còn được sử dụng bởi hộp điều khiển động cơ, hộp số tự động, hệ thống ABS, ESP và các hệ thống hỗ trợ lái. Điều này đòi hỏi một hệ thống truyền chung, có khả năng chia sẻ dữ liệu nhanh, chính xác và đáng tin cậy.
CAN Bus được phát triển nhằm đáp ứng các yêu cầu trên. Với cấu trúc mạng đa chủ, cơ chế phân xử thông minh và khả năng tự phát hiện lỗi mạnh mẽ, CAN Bus nhanh chóng trở thành tiêu chuẩn truyền chủ đạo trên ô tô. Hiện nay, hầu hết các dòng xe du lịch và xe thương mại đều sử dụng CAN Bus làm nền tảng truyền chính.
Hệ thống CAN Bus giữ vai trò như “xương sống” của mạng điện – điện tử trên xe. Nó đảm bảo các hộp điều khiển luôn có cùng trạng thái thông tin, giúp các hệ thống phối hợp chính xác, nâng cao độ an toàn, độ ổn định vận hành và khả năng chẩn đoán khi xảy ra hư hỏng.
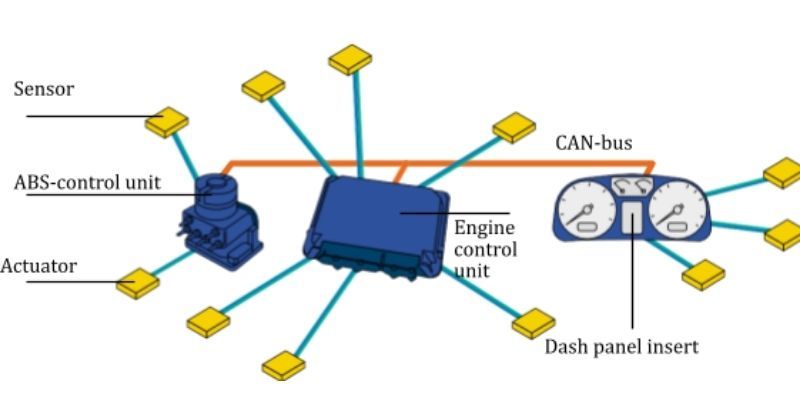
Dựa theo yêu cầu về tốc độ truyền và tính thời gian thực, CAN Bus trên ô tô thường được phân chia thành các mạng con như CAN truyền động, CAN thân xe và CAN thông tin giải trí. Các mạng này được liên kết với nhau thông qua hộp điều khiển Gateway.
Hệ thống CAN Bus trên ô tô bao gồm nhiều thành phần liên kết chặt chẽ với nhau, trong đó mỗi thành phần đảm nhiệm một vai trò riêng biệt.
Hộp điều khiển là bộ điều khiển điện tử chịu trách nhiệm điều khiển một hoặc nhiều chức năng trên xe. Mỗi hộp điều khiển thường bao gồm vi điều khiển trung tâm (CPU), bộ nhớ chương trình, bộ nhớ dữ liệu, các mạch xử lý tín hiệu vào/ra và mạch nguồn. hộp điều khiển thu thập tín hiệu từ các cảm biến, xử lý theo thuật toán được lập trình sẵn và điều khiển các cơ cấu chấp hành.
Trong mạng CAN, hộp điều khiển không chỉ xử lý dữ liệu nội bộ mà còn phải trao đổi thông tin với các hộp điều khiển khác. Do đó, hộp điều khiển được trang bị thêm mô-đun CAN để thực hiện chức năng truyền.
2. Mô-đun CAN (CAN Controller)
Mô-đun CAN là thành phần chịu trách nhiệm trực tiếp cho quá trình truyền và nhận dữ liệu CAN. Các chức năng chính của mô-đun CAN gồm:
- Đóng gói dữ liệu thành thông điệp CAN theo đúng cấu trúc giao thức.
- Quản lý hộp thư gửi và hộp thư nhận.
- Thực hiện cơ chế phân xử khi nhiều hộp điều khiển cùng truyền dữ liệu.
- Kiểm tra và phát hiện lỗi truyền thông qua CRC, bit ACK và error frame.
Trong các hộp điều khiển hiện đại, mô-đun CAN thường được tích hợp trực tiếp trong vi điều khiển, giúp giảm số lượng linh kiện và tăng độ tin cậy.
Có thể bạn quan tâm: Khoá học Kỹ thuật Sửa chữa Điện – Điện tử Ô tô
3. Transceiver CAN
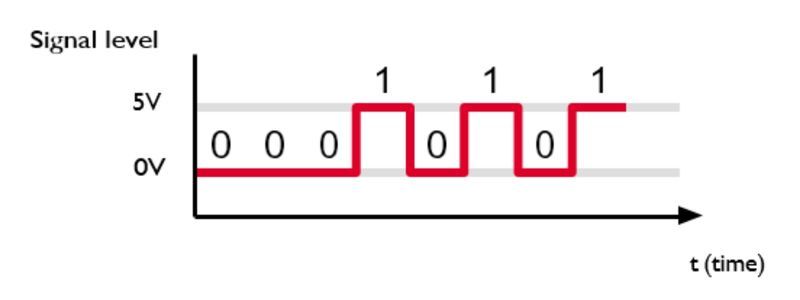
Transceiver CAN là mạch giao tiếp giữa mô-đun CAN và đường truyền CAN Bus. Nó có nhiệm vụ chuyển đổi tín hiệu logic mức thấp (0/1) bên trong hộp điều khiển thành tín hiệu điện áp trên cặp dây CAN High và CAN Low. Đồng thời, transceiver cũng chuyển tín hiệu điện áp từ bus về dạng logic để mô-đun CAN xử lý.
Một đặc điểm quan trọng của transceiver là khả năng giám sát bus liên tục, cho phép hộp điều khiển so sánh tín hiệu gửi đi và tín hiệu nhận về, từ đó phục vụ cho cơ chế phân xử và phát hiện lỗi.
4. Đường truyền CAN Bus
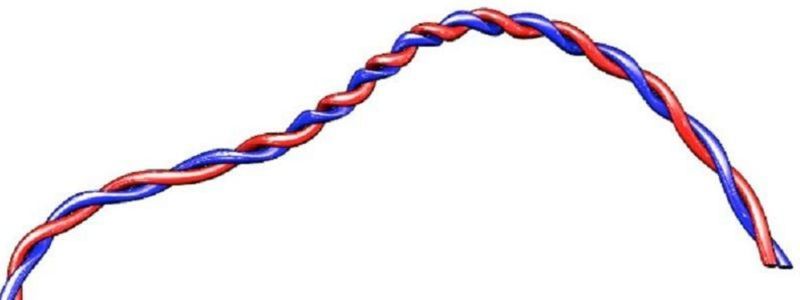
Đường truyền CAN Bus thường sử dụng cặp dây xoắn CAN High và CAN Low. Việc xoắn dây giúp triệt tiêu nhiễu điện từ sinh ra từ môi trường xung quanh và từ chính các thiết bị điện trên xe. Các hộp điều khiển được kết nối song song vào đường bus, tạo thành mạng đa chủ.
5. Nguyên lý hoạt động
CAN Bus hoạt động theo nguyên lý truyền nối tiếp. Khi một hộp điều khiển cần gửi dữ liệu, thông tin sẽ được đóng gói thành một thông điệp CAN, bao gồm mã định danh (Identifier) và vùng dữ liệu (Data Field) theo chuẩn giao thức CAN.
Quá trình truyền trên CAN Bus diễn ra theo các bước sau:
- Hộp điều khiển thu thập tín hiệu từ cảm biến và xử lý nội bộ theo chương trình điều khiển.
- Dữ liệu cần chia sẻ được ghi vào vùng nhớ gửi của mô-đun CAN.
- Mô-đun CAN kiểm tra trạng thái bus thông qua đường RX để xác định bus đang rảnh hay bận.
- Khi bus rảnh, thông điệp được truyền từng bit lên CAN Bus thông qua transceiver.
CAN Bus sử dụng cơ chế truyền phát dữ liệu chung nên mọi hộp điều khiển đều nhận được thông điệp. Tuy nhiên, chỉ những hộp điều khiển có nhu cầu sử dụng dữ liệu đó mới lưu thông điệp vào hộp thư nhận và xử lý tiếp.
Trong trường hợp nhiều hộp điều khiển cùng lúc muốn truyền dữ liệu, CAN Bus sử dụng cơ chế phân xử. Mỗi hộp điều khiển bắt đầu truyền mã định danh của thông điệp và đồng thời giám sát tín hiệu trên bus. Hộp điều khiển có mức ưu tiên thấp hơn sẽ tự động dừng quá trình truyền và chuyển sang chế độ nhận, đảm bảo không xảy ra va chạm dữ liệu trên bus. Quá trình này diễn ra rất nhanh và không gây mất dữ liệu.
Một số thông số kỹ thuật đặc trưng của hệ thống CAN Bus trên ô tô bao gồm:
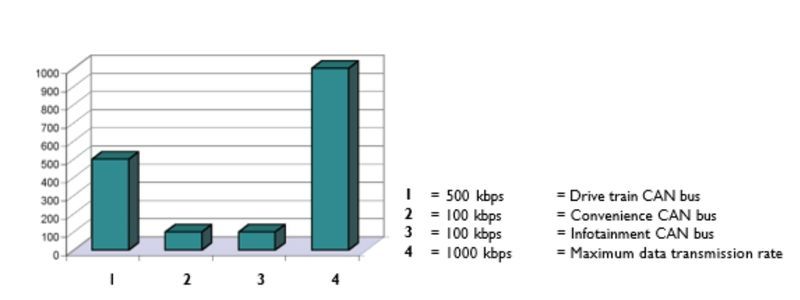
- Tốc độ truyền dữ liệu:
- CAN truyền động: khoảng 500 kbps, đáp ứng yêu cầu thời gian thực.
- CAN thân xe và CAN thông tin giải trí: khoảng 100 kbps.
- Dung lượng dữ liệu mỗi thông điệp: tối đa 8 byte dữ liệu.
- Điện áp tín hiệu:
- Trạng thái dominant: CAN High tăng điện áp, CAN Low giảm điện áp, tạo chênh lệch rõ rệt.
- Trạng thái recessive: điện áp CAN High và CAN Low gần bằng nhau.
Hệ thống CAN Bus đóng vai trò nền tảng trong kiến trúc điện – điện tử ô tô hiện đại. Việc hiểu rõ cấu trúc, nguyên lý hoạt động và đặc điểm kỹ thuật của CAN Bus giúp kỹ thuật viên chẩn đoán chính xác lỗi truyền thông, nâng cao hiệu quả sửa chữa và đảm bảo an toàn vận hành của xe.
Trên đây là toàn bộ thông tin về chủ đề hệ thống mạng CAN BUS trên xe Audi mà trung tâm VATC muốn gửi đến bạn. Hy vọng bài viết này sẽ bổ ích và hữu dụng với bạn.
Nếu bạn có đang đam mê hoặc muốn tìm hiểu về các khóa học trong ngành ô tô thì liên hệ ngay với trung tâm VATC theo thông tin dưới đây để được tư vấn chi tiết nhất nhé!
Trung Tâm Huấn Luyện Kỹ Thuật Ô Tô Việt Nam – VATC
- Địa chỉ: Số 4-6, Đường số 4, Phường Hiệp Bình Phước, Thành Phố Thủ Đức, Thành phố Hồ Chí Minh
- Điện thoại: 0945711717
- Email: info@oto.edu.vn
Xem thêm:


