
Trong thế giới xe hiện đại, hệ thống phanh tự động khẩn cấp (AEB) đóng vai trò như “lá chắn” bảo vệ hành khách khỏi các tình huống nguy hiểm bất ngờ. Bài viết này sẽ giúp bạn hiểu rõ nguyên lý hoạt động, cấu tạo và tầm quan trọng của hệ thống an toàn thông minh này.
1. Giới thiệu chung về hệ thống phanh tự động khẩn cấp
Các công nghệ an toàn là điều luôn được các hãng xe nghiên cứu và phát triển để chiếc ô tô có thể đảm bảo an toàn nhất cho những người ngồi trong xe. Trong số đó thì công nghệ cảnh báo va chạm phía trước với phanh tự động khẩn cấp (AEB) là một trong những hệ thống khiến việc lái xe trở nên an toàn hơn.
Hệ thống phanh tự động khẩn cấp (Auto Emergency Braking – AEB) là hệ thống an toàn có khả năng ngăn chặn sớm một vụ tai nạn hoặc giảm thiểu tốc độ va chạm với xe phía trước. Nó đặc biệt hữu ích trong trường hợp người lái gặp chướng ngại vật bất ngờ và không kịp xử lý đạp phanh hoặc chỉ đạp nhẹ phanh.
AEB có ba đặc điểm:
- Tự động: hệ thống hoạt động độc lập với người lái để tránh hoặc giảm thiểu tai nạn.
- Khẩn cấp: hệ thống sẽ chỉ can thiệp trong tình huống nguy cấp.
- Phanh: hệ thống cố gắng tránh tai nạn bằng cách áp dụng phanh.
2. Chức năng
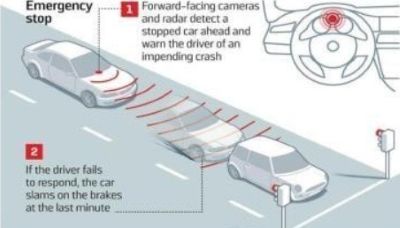
Đúng như tên gọi, hệ thống phanh tự động khẩn cấp có chức năng chính là tự động phanh xe một cách độc lập với lái xe trong tình huống nguy cấp, đưa ra cảnh báo sớm cho người lái về nguy cơ va chạm bằng âm thanh, hình ảnh hoặc rung vô lăng, hoặc kết hợp cả ba.
Trong trường hợp lái xe ô tô không phản ứng lại các cảnh báo, AEB sẽ tự động phanh. Ngoài ra, một số hệ thống AEB còn có có thể căng dây đai an toàn giúp giảm thiểu tổn thương cho hành khách.
3. Phân loại
Hệ thống ngăn ngừa va chạm chia làm 3 loại chính:
- Hệ thống ngăn ngừa va chạm ở tốc độ thấp: Phiên bản này có chức năng ngăn ngừa va chạm xảy ra trong thành phố. Thông thường loại này có thể phản ứng đối với ô tô khác nhưng không nhạy cảm đối với người đi bộ và các loại xe khác. Tùy vào từng phiên bản, radar có thể quét ở phía trước xe từ 8-10 m và ngăn ngừa va chạm khi di chuyển ở tốc độ 30 – 50 km/h
- Hệ thống ngăn ngừa va chạm ở tốc độ cao: Phiên bản này thường dùng radar tầm xa có thể quét các xe khác ở phía trước cách khoảng 200m ở tốc độ lên đến 80 km/h.
- Hệ thống ngăn ngừa va chạm với khách bộ hành: Phiên bản này sẽ sử dụng kết hợp camera và radar để phát hiện khách bộ hành qua hình dáng và đặc điểm của người đi bộ. Sau đó sẽ tính toán tốc độ của xe để xác định xem có tiềm ẩn nguy hiểm hay không.
4. Cấu tạo của hệ thống phanh tự động khẩn cấp
4.1. Bộ phận cảm biến
a) Các loại cảm biến sử dụng trên ô tô
Tùy theo nhà sản xuất mà hệ thống AEB sử dụng cảm biến radar, lidar hoặc camera để giám sát các nguy cơ và phát hiện các va chạm tiềm tàng với xe khác cũng như việc nhận dạng hình ảnh của người đi bộ gần đó một cách hiệu quả rồi sau đó truyền tín hiệu về cho bộ điều khiển.
Radar (Radio Detection And Ranging):
- Một hệ thống radar tạo ra bức xạ trong vùng sóng của phổ điện từ. Các sóng radar được tạo ra được phản xạ bởi các vật thể rắn. Dựa vào đặc điểm của tín hiệu phản xạ, vị trí, khoảng cách, vận tốc có thể được xác định. Các hệ thống radar ô tô hiện đại thường tạo ra và nhận điện từ sóng ở tần số 77 hoặc 79 GHz với bước sóng tương ứng trong phạm vi milimet.
- Radar tầm ngắn được tối ưu hóa để hoạt động cách xe khoảng 15 đến 20 feet, radar tầm trung hoạt động trong phạm vi khoảng 15 đến 100 feet, Radar tầm xa được tối ưu hóa cho khoảng cách xa hơn khoảng 100 feet.
Ưu điểm của radar là có thể hoạt động trong hầu hết thời tiết các điều kiện như mưa, tuyết và sương mù. Radar cũng không bị ảnh hưởng bởi điều kiện ánh sáng xung quanh. Ngoài ra, cảm biến radar thường có thể được tích hợp phía sau mặt ga lăng và cản nhựa vì bức xạ có thể xuyên qua hầu hết các loại nhựa mà không bị mất tín hiệu.

Camera:
- Cảm biến hình ảnh (còn được gọi là máy ảnh kỹ thuật số) phát hiện ánh sáng khả kiến trong phổ EM và chuyển đổi đầu vào thành mã kỹ thuật số.
- Cảm biến hình ảnh được sử dụng cho các ứng dụng ô tô thường nhận biết các bức xạ EM trong phạm vi nhìn thấy (khoảng 380 đến 700nm). Máy ảnh rất nhạy cảm với điều kiện thời tiết khắc nghiệt nên chúng thường được sử dụng như hỗ trợ cho các hệ thống Radar.
Tuy nhiên, cảm biến hình ảnh nhận biết các bức xạ khác trong phổ EM có thể hữu ích. Bức xạ cận hồng ngoại (NIR) bao gồm bức xạ với tần số chỉ dưới ngưỡng phát hiện cho tầm nhìn của con người có bước sóng (760 – 1400nm). Ngoài ra, bức xạ hồng ngoại sóng trung (MWIR) và / hoặc sóng dài (LWIR) có thể được đo bằng cảm biến hình ảnh cho hình ảnh nhiệt. Các sinh vật máu nóng phát ra bức xạ trong phần này của phổ EM. Do đó hình ảnh nhiệt có thể tạo ra hình ảnh của người và động vật bất kể điều kiện ánh sáng. Ngoài ra, hình ảnh nhiệt vẫn có hiệu quả trong thời tiết bất lợi như mưa, tuyết và sương mù.

Lidar (Light Detection And Ranging):
- Lidar là radar sử dụng tia cực tím hoặc gần hồng ngoại cho các đối tượng hình ảnh.
- Lidar ô tô điển hình có bước sóng khoảng 850 hoặc 900nm.
- Thông thường, nó phát xung với công suất khoảng hàng chục milliwatts với công suất cực đại lên tới 80 W.
- Phạm vi của Lidar phổ biến là từ 10 đến 20m và chúng được sử dụng để phát hiện trở ngại trong tốc độ thấp trong quá trình lái xe đô thị.
- Lidar lần đầu tiên được áp dụng làm cảm biến cho ACC vì chúng nhỏ hơn.
- Ngày nay chúng thường được thay thế bởi Radar hoặc máy ảnh do chi phí quá cao và khả năng phân giải thấp.

b) Đánh giá hiệu quả của hệ thống AEB khi sử dụng các cảm biến khác nhau
Hệ thống sử dụng Lidar sensor:

Khi sử dụng cảm biến Lidar thì kết quả của hệ thống phân thành ba trường hợp: ở vận tốc dưới 20km/h thì có thể tránh hoàn toàn va chạm, còn ở vận tốc 20-30km/h thì chỉ giảm vận tốc va chạm khi nó xảy ra, trên 30km/h thì hệ thống không thể giảm thiểu được va chạm.
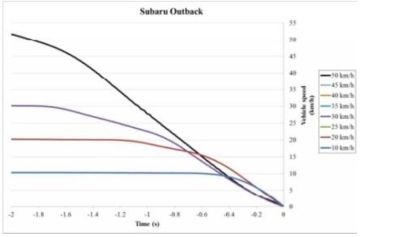
Hệ thống sử dụng Radar:

Khi sử dụng cảm biến Radar thì kết quả của hệ thống phân thành 2 trường hợp: ở vận tốc dưới 30km/h thì hệ thống có thể can thiệp và giúp xe tránh hoàn toàn khỏi va chạm nhưng khi đạt vận tốc trên 30km/h thì hệ thống lại không thể.
Hệ thống sử dụng Stereo camera:
Đối với các cảm biến camera thông thường thì cũng giống như Lidar và Radar hệ thống chỉ can thiệp được khi xe ở vận tốc dưới 30km/h nhưng nổi bật đó là Stereo Camera có thể giảm thiểu hoàn toàn va chạm ở tốc độ dưới 50km/h.
Hệ thống sử dụng tích lidar, radar và camera sensor:
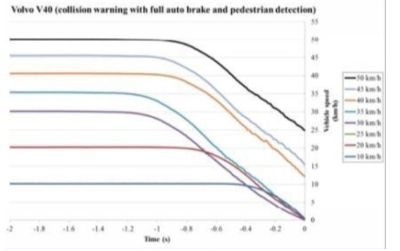
Một cách giảm thiểu tốc độ va chạm hiệu quả hơn và ở tốc độ cao hơn đó chinh là tích hợp các loại cảm biến lại với nhau bao gồm Lidar, radar và camera sensor. Ví dụ điển hình trên chiếc Volvo V40 này, nó có thể tránh va chạm hoàn toàn ở tốc độ dưới 35km/h và có thể giảm thiểu tốc độ khi va chạm ở vận tốc từ 35-50 km/h.
4.2. Bộ điều khiển AEB
Những hộp điều khiển Electric Control Unit (ECU) sẽ được thiết kế, lập trình để tính toán về khoảng cách xe, dự đoán thời gian va chạm, vận tốc và điều khiển cơ cấu chấp hành thực hiện quá trình cảnh báo và phanh.
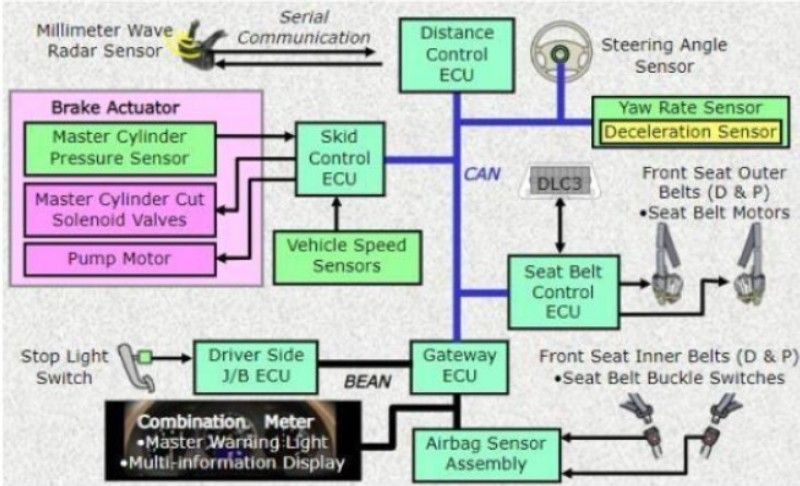
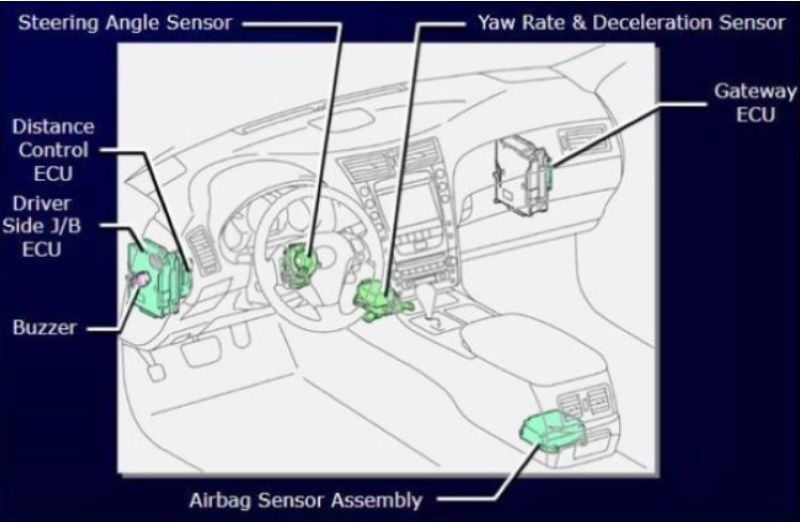
Thông thường bộ điều khiển AEB bao gồm những bộ phận chính sau:
- Distance Control ECU : nhận tính hiệu từ radar để tính toán khoảng cách va chạm với vật cản phía trước.
- Seat Belt Control ECU : điều khiển siết chặt dây an toàn nếu có nguy cơ xảy ra va chạm.
- Skid Control ECU : điều khiển các hoạt động của phanh.
- Gateway ECU: cổng giao tiếp giữa các hộp điều khiển.
Vị trí của các hộp điều khiển:
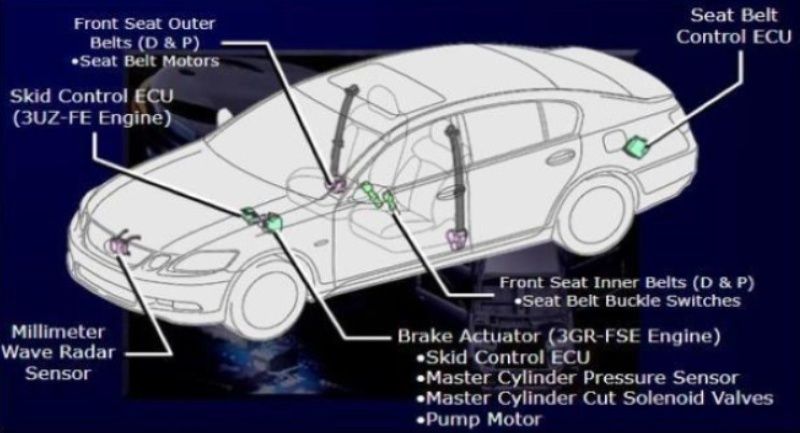
4.3. Cơ cấu chấp hành
Bao gồm các bộ phận như phanh (ABS), taplo, tay lái (rung), chuông cảnh báo, dây an toàn.
- Phanh: hệ thống phanh hiện nay thì đều sử dụng hệ thống phanh ABS chống bó cứng.
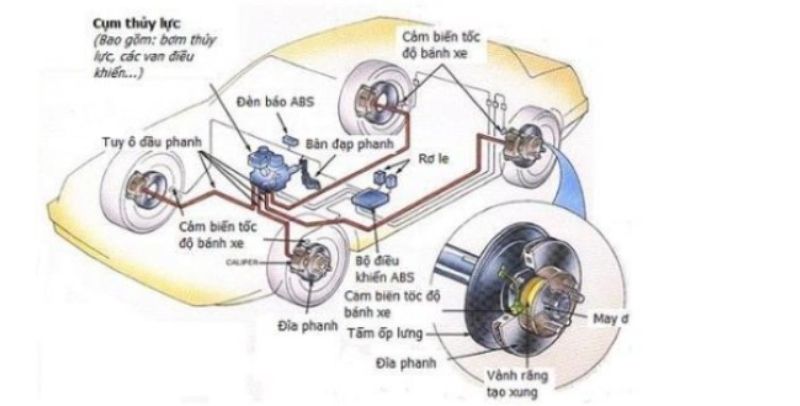
Hệ thống ABS sẽ hoạt động ngay cả khi người lái không đạp bàn đạp phanh thông qua tín hiệu từ hệ thống AEB truyền tới bộ điều khiển ABS.
- Cơ cấu Seat Belt: Dây đai an toàn được vận hành bởi một motor điện, một cơ cấu bánh răng và ly hợp.
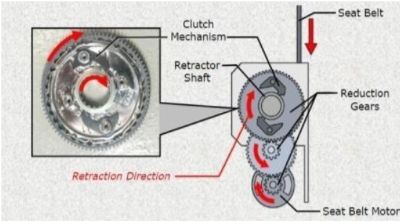
Ở chế độ hoạt động bình thường khi ta kéo và thả dây đai an toàn, dựa vào cơ cấu bánh răng và ly hợp dây đai sẽ được rút lại bằng cách xoay của trục theo hướng đầu vào để phù hợp với vị trí người ngồi.
Khi một sự cố không thể tránh khỏi được xác định bộ điều khiển sẽ gửi tín hiệu về ECU seat belt một dòng điện sẽ được cung cấp vào motor, lúc này motor sẽ quay theo hướng đầu vào kéo theo cơ chế bánh răng quay làm cho dây đai siết lại. Trường hợp khi sự cố được tránh dây đai an toàn được nhả ra, lúc này động cơ được quay ngược lại để giải phóng cơ cấu ly hợp. Khi cơ cấu ly hợp được nhả ra, trục trở lại vị trí lúc đầu và dây đai an toàn trở về trạng thái thông thường.

Hình 1.14 Cơ cấu ly hợp
- Chuông, taplo, tay lái: tạo ra các cảnh báo cho người lái bằng đèn cảnh báo, tiếng kêu và rung cùng một lúc khi có va chạm sắp xảy ra.
5. Nguyên lý hoạt động hệ thống Automatic Emergency Brake
Sơ đồ tổng quan:
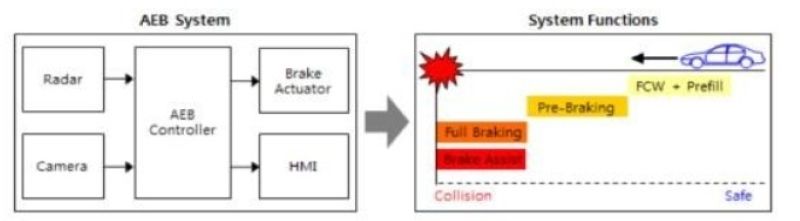
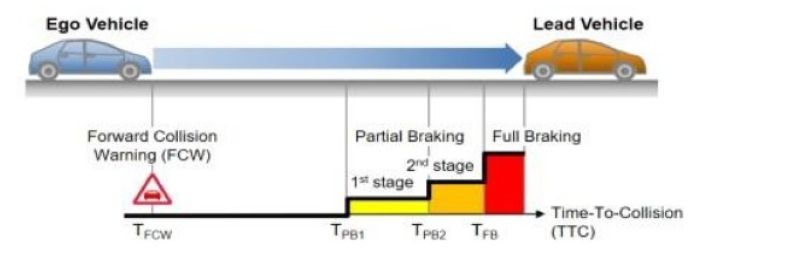
Quá trình hoạt động của hệ thống AEB được chia làm 3 giai đoạn dựa vào những tín hiệu đầu vào là khoảng cách xe, vận tốc tương đối. Sau đó được bộ điều khiển xử lý để tiến hành thực hiện quá trình phanh giảm tốc bằng các cơ cấu chấp hành.
- Giai đoạn thứ 1: Đây là giai đoạn cảnh báo người lái, lúc này các cảm biến thu thập dữ liệu về khoảng cách và vận tốc của xe đưa về bộ điều khiển để tính toán thời gian dự đoán va chạm để tiến hành cảnh báo người lái bằng tiếng chuông, đèn cảnh báo trên taplo hoặc rung tay lái.
- Giai đoạn thứ 2: Sau khi xác định được thời gian dự đoán va chạm và cảnh báo cho người lái nhưng không có phản hồi nào lại từ người lái vì một lý do nào đó thì hệ thống AEB sẽ tiến hành giai đoạn chuẩn bị phanh bằng cách bộ điều khiển sẽ gửi tín hiệu điều khiển cơ cấu phanh thực hiện rà phanh nhằm mục đích nhắc nhở và giảm tốc độ để người lái có thể tránh va chạm kịp thời.
- Giai đoạn thứ 3: Ở giai đoạn này thì hệ thống AEB sẽ hoạt động một cách độc lập nếu không nhận ra phản ứng của người lái ở giai đoạn trước. Lúc này hệ thống sẽ điều khiển phanh hoàn toàn để giảm thiểu va chạm.
Tính toán thời gian va chạm: thời gian va chạm được chia làm 2 giai đoạn là thời gian phản ứng của người lái và thời gian dừng

- Thời gian phản ứng ( treact): là thời gian hệ thống cảnh báo về va chạm sắp xảy ra khi hệ thống phanh chưa hoạt động.
- Thời gian dừng (stop): là thời gian khi người lái bắt đầu đạp phanh hoặc hệ thống tự động phanh cho việc giảm tốc brake đến khi xe dừng hẳn.
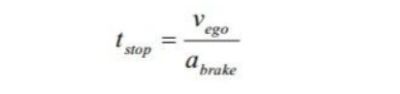
- Vậy tổng thời gian va chạm (Time to Collision) có thể được tính bằng:

Hoạt động của cơ cấu phanh:
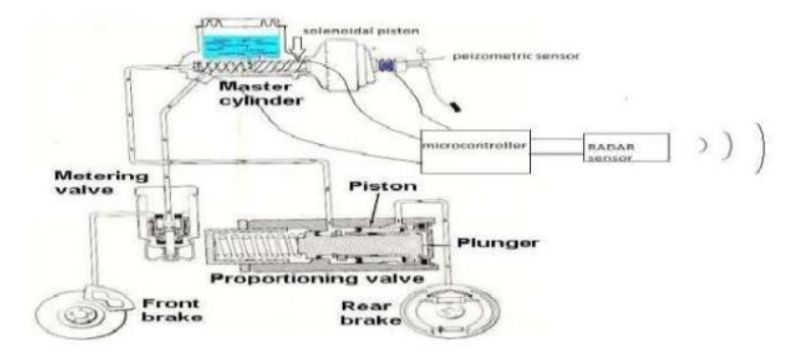
Hệ thống phanh tự động được phát triển nhờ sự đổi mới pít-tông của xi-lanh chính hoạt động theo cuộn dây điện từ.
Khi cảm biến gửi và nhận được tín hiệu sau khi xác định được chướng ngại vật, nó có thể phán đoán khoảng cách tương đối giữa các phương tiện thông qua sóng điện từ của cảm biến và bằng cách liên tục làm điều này, nó cũng có thể xác định tốc độ di chuyển của xe và chướng ngại vật.
Khi khoảng cách và vận tốc được gửi đến bộ điều khiển, nó có thể phán đoán liệu tai nạn có xảy ra hay không.
Nếu có thì mức độ lực khác nhau phụ thuộc vào khoảng cách tương đối của xe và chướng ngại vật và lực phanh có thể thay đổi được bằng cách thay đổi dòng điện thông qua solenoid được điều khiển bởi bộ điều khiển.
Dòng điện trong cuộn dây sẽ tạo ra lực hút piston để sinh ra áp suất phanh mà không cần đến lực phanh từ bàn đạp.
Piston solenoid còn có tác dụng hỗ trợ lực phanh cho tài xế khi đạp phanh khẩn cấp nhằm tăng hiệu quả phanh trong trường hợp tài xế đạp phanh khi khoảng cách với chướng ngại vật quá gần.
6. Ưu điểm và nhược điểm
Ưu điểm:
- Cảnh báo cho người lái các tình huống va chạm.
- Giúp duy trì sự cân bằng cho người lái.
- Giảm thiểu tai nạn.
Nhược điểm:
- Chi phí giá thành cao.
- Ảnh hưởng đến mạng lưới giao thông.
- Nếu nó hoạt động liên tục ảnh hưởng đến cảm giác thoải mái người lái làm họ không tin tưởng.
- Khi thời tiết xấu ảnh hưởng đến cảm biến.
Trên đây là toàn bộ thông tin về chủ đề hệ thống phanh tự động khẩn cấp – Automatic Emergency Brake mà trung tâm VATC muốn gửi đến bạn. Hy vọng bài viết này sẽ bổ ích và hữu dụng với bạn.
Nếu bạn có đang đam mê hoặc muốn tìm hiểu về các khóa học trong ngành ô tô thì liên hệ ngay với trung tâm VATC theo thông tin dưới đây để được tư vấn chi tiết nhất nhé!
Trung Tâm Huấn Luyện Kỹ Thuật Ô Tô Việt Nam – VATC
- Địa chỉ: Số 4-6, Đường số 4, Phường Hiệp Bình Phước, Thành Phố Thủ Đức, Thành phố Hồ Chí Minh
- Điện thoại: 0945711717
- Email: info@oto.edu.vn
Xem thêm:


