
Trong mạng CAN, IC CAN Transceiver là phần tử giao tiếp giữa vi điều khiển/ECU và đường truyền CANH–CANL. Bài viết mô tả cấu tạo khối driver/receiver, chế độ dominant–recessive, điện áp vi sai, cơ chế lọc nhiễu, bảo vệ quá áp/ngắn mạch và các dấu hiệu hư hỏng thường gặp khi chẩn đoán lỗi mạng CAN.
CAN là một chuẩn giao tiếp có dây được phát triển bởi công ty BOSCH. CAN được thiết kế để cho phép liên lạc hiệu quả và đơn giản giữa các bộ điều khiển điện tử (ECU – Electronic Control Unit – Node) trong một mạng phức tạp.
1. Cấu tạo của CAN Transceiver
IC CAN Transceiver (bộ thu phát CAN) có cấu tạo bao gồm bộ phát (transmitter) và bộ thu (receiver), đóng vai trò chuyển đổi tín hiệu logic (TTL/CMOS) từ vi điều khiển sang tín hiệu vi sai (differential) trên cặp dây bus CAN_H/CAN_L, đồng thời tích hợp các tính năng chống nhiễu, ngắn mạch và quản lý năng lượng để truyền dữ liệu.
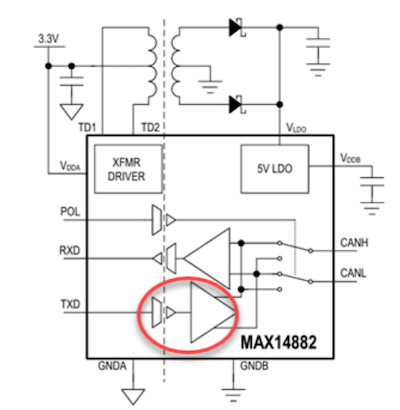
- Bộ phát (Transmitter): Chuyển tín hiệu TX từ vi điều khiển thành tín hiệu vi sai, đẩy điện áp CAN_H lên 3.75V và hạ CAN_L xuống 1.25 khi truyền bit 0 (dominant) và kéo điện áp CAN_H và CAN_L bằng nhau ~2.5V khi truyền bit 1 (Recessive)
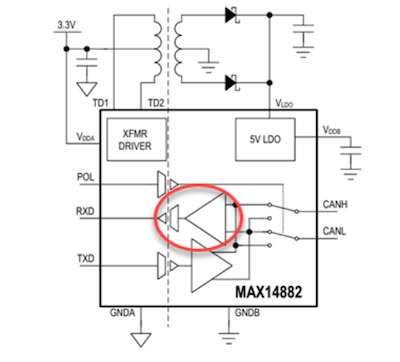
- Bộ thu (Receiver): Nhận tín hiệu vi sai từ bus so sánh chênh lệch giữa CAN_H và CAN_L để chuyển đổi thành tín hiệu Rx và xác nhận trạng thái của bit để gửi về vi điều khiển
- Khối điều khiển chế độ (Mode Control): Hỗ trợ các chế độ Normal (Hoạt động bình thường), Stanbly (tiết kiệm điện) hoặc Silent (chỉ nhận, không truyền)
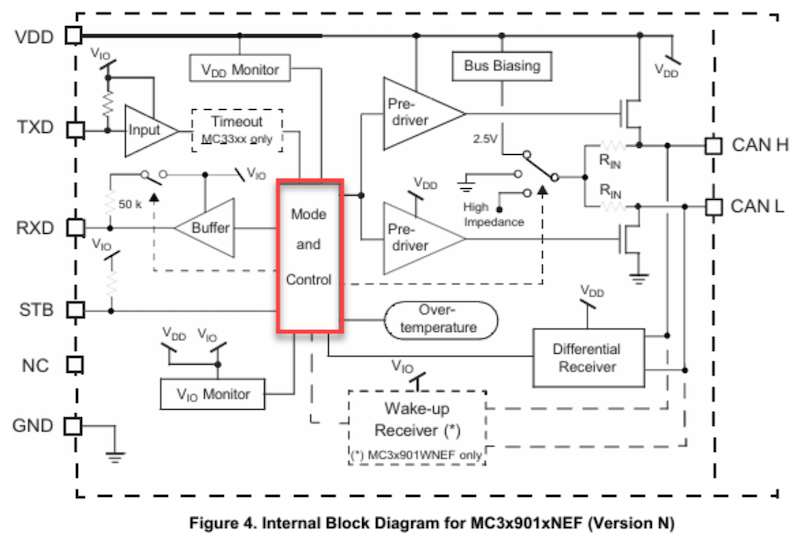
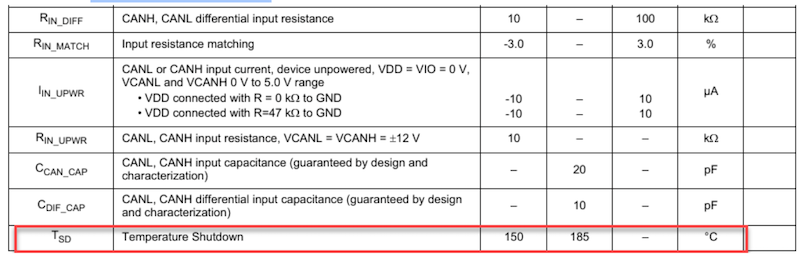
- Khối bảo vệ (Over-temperature): Nếu IC quá nhiệt và vượt ngưỡng TSD, IC sẽ ngắt để bảo vệ
2. Nguyên lý hoạt động
Dựa vào cấu trúc của IC transceiver TCAN332 của hãng TEXAS INSTRUMENTS như hình bên dưới
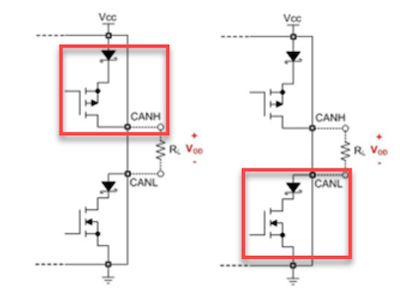
Cấu trúc ở phía đầu ra CAN_H bao gồm 1 diode mắc nối tiếp với 1 mosfet kênh P. Ngược lại, đầu ra CAN_L mắc nối tiếp 1 diode với 1 mosfet kênh N. Ở đầu VCC một diode được mắc nối tiếp để ngăn chặn nếu điện áp của CAN_H cao hơn VCC và chạy ngược lên VCC. Còn ở phía GND mắc nối tiếp 1 diode để tránh việc điện áp CAN_L giảm xuống thấp hơn tại điểm GND.
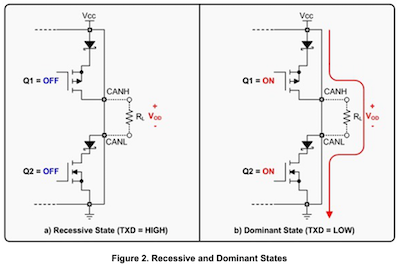
Như hình phía trên ở trạng thái Recessive (1) Q1 và Q2 ở trạng thái OFF lúc này không có dòng điện chạy từ VCC xuống. Điện áp tại CAN_H và CAN_L bằng nhau làm cho VOD=0.
Ngược lại ở trạng thái Dominant (0) cả Q1 và Q2 đều ở trạng thái ON lúc này dòng điện chạy từ VCC xuống GND thông qua RL và tạo ra điện áp VOD=VCAN_H–VCAN_L.
Lưu ý:
- Ở trạng thái Recessive (1) hiệu điện áp 2 chân CAN_H và CAN_L ≈0V
- Ở trạng thái Dominant (0) hiệu điện áp 2 chân CAN_H và CAN_L 2.5V
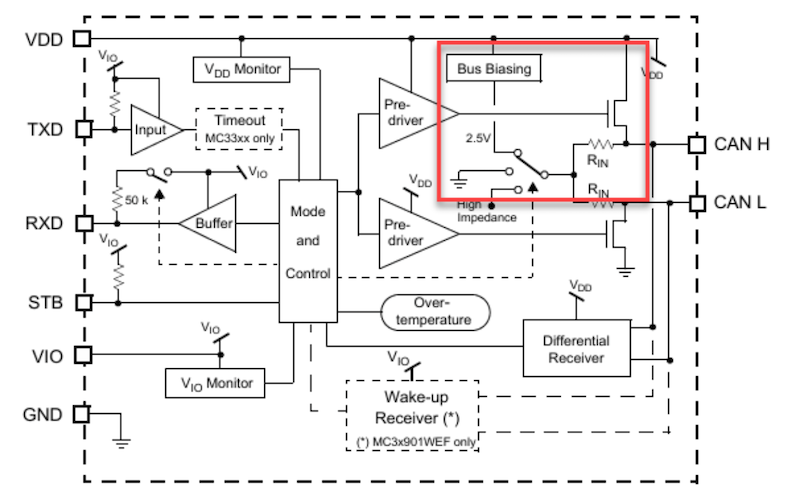
Khi ở trạng thái Recessive (1) điện áp 2 chân CAN_H và CAN_L bằng nhau được là khối Bus Biasing giống như 1 công tắc điện tử giúp cho 2 chân CAN_H và CAN_L ở mức điện áp 2.5V. Việc ở trạng thái Recessive điện áp 2 chân CAN_H và CAN_L phải bằng nhau để điện áp ở chế độ chung (common-state) (Vcommon=2.5V)

Việc giữ cho Vcommon ổn định, lý tưởng nhất Vcommon luôn là một đường thẳng giúp chuyển trạng thái từ recessive sang dominant êm ái. Triệt tiêu từ trường vì 2 dây xoắn vào nhau và mang dòng điện ngược chiều nhưng biên độ đối xứng qua Vcommon do đó từ trường dây này tạo ra sẽ bị từ trường dây kia triệt tiêu
Trên đây là toàn bộ thông tin về phân tích cấu tạo và nguyên lý truyền tin của IC CAN Transceiver trên ô tô hiện đại mà trung tâm VATC muốn gửi đến bạn. Hy vọng bài viết này sẽ bổ ích và hữu dụng với bạn!
Nếu bạn có đang đam mê hoặc muốn tìm hiểu về các khóa học trong ngành ô tô thì liên hệ ngay với trung tâm VATC theo thông tin dưới đây để được tư vấn chi tiết nhất nhé!
Trung Tâm Huấn Luyện Kỹ Thuật Ô Tô Việt Nam – VATC
- Địa chỉ: Số 4-6, Đường số 4, Phường Hiệp Bình Phước, Thành Phố Thủ Đức, Thành phố Hồ Chí Minh
- Điện thoại: 0945711717
- Email: info@oto.edu.vn
Xem thêm:


