
Mạng giao tiếp cục bộ LIN được thiết kế để kết nối và điều khiển các thiết bị điện tử phụ trợ trong ô tô với chi phí thấp và độ tin cậy cao. Cùng tìm hiểu nguyên lý hoạt động, cấu trúc và những ứng dụng phổ biến của LIN trong các hệ thống điều khiển thông minh trên xe hiện đại.
Mạng giao tiếp cục bộ – Local Interconnect Network (LIN) là một giải pháp tiết kiệm chi phí, tốc độ thấp thay thế cho mạng CAN. Mạng LIN có tên như vậy là do nó là một hệ thống con ‘cục bộ’. Tốc độ truyền dữ liệu có thể lên tới 10 kBit/giây. Nó được thiết kế cho các cấp độ: cảm biến, bộ truyền động, hệ thống điện thân xe (gạt mưa, nâng hạ kính,…), hệ thống sạc,…
1. Cấu trúc hệ thống mạng LIN
Một hệ thống có thể chứa tới 16 mô-đun hoặc thành phần, bao gồm: 1 mô-đun master (chủ) và 15 mô-đun slave (linh kiện thông minh). Mạng LIN là cấu trúc mạng tuyến tính, với giao tiếp qua một dây duy nhất.
Hình minh họa bên dưới cho thấy cấu trúc mạng LIN cơ bản:
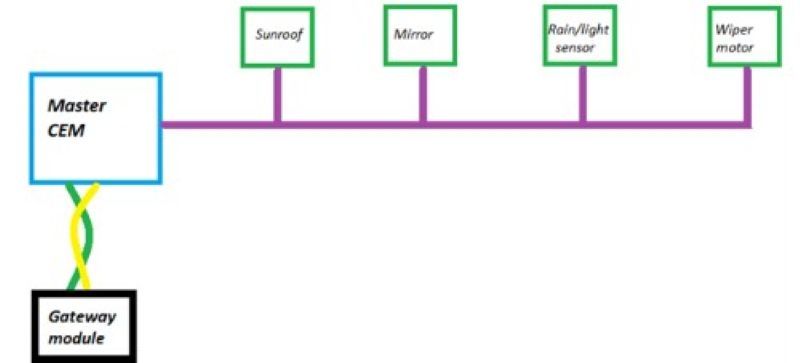
Mô-đun điện tử trung tâm (Central Electronics Module – CEM) là mô-đun chính và giao tiếp với mô-đun Gateway thông qua Mạng điều khiển khu vực (Controller Area Network – CAN). Mỗi thành phần trong mạng LIN là một cảm biến hoặc một bộ truyền động, có khả năng truyền và nhận tin nhắn LIN. Mô-đun chính chịu trách nhiệm kiểm soát thời gian của gói dữ liệu tin nhắn.
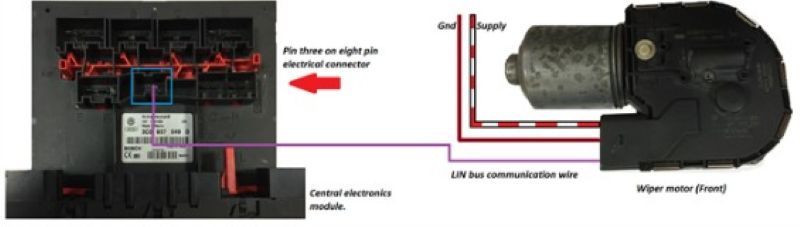
Hình ảnh trên cho thấy một CEM và mô tô cần gạt nước phía trước. Dây màu tím là dây mạng LIN và được sử dụng để điều khiển tốc độ và độ trễ ngắt quãng cho cần gạt nước.
2. Ứng dụng mạng LIN vào hệ thống sạc
Một hệ thống cụ thể sử dụng giao tiếp mạng LIN là hệ thống sạc trên xe. Sơ đồ bên dưới cho thấy bố cục hệ thống sạc thông thường được lắp trên xe đời cũ.
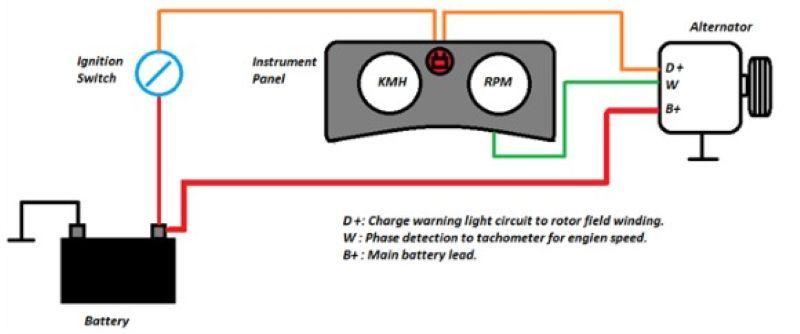
- Chân D+: được sử dụng để cấp dòng điện kích từ cho cuộn dây rotor. Cuộn dây rotor được đấu nối tiếp với đèn cảnh báo sạc trên đồng hồ táp lô.
- Chân W: được sử dụng để đo tốc độ động cơ dựa vào cuộn dây stator.
- Chân B: nối với cọc dương bình ắc quy
Bố cục của một hệ thống sạc hiện đại sử dụng bus LIN được hiển thị bên dưới:
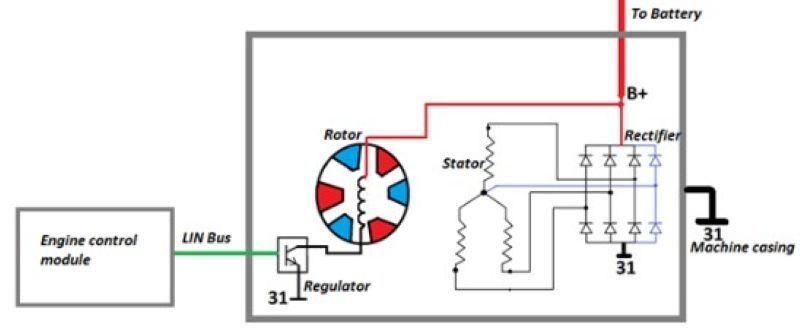
Cấu tạo bên trong của máy phát điện về cơ bản là giống nhau:
- Rotor
- Stator
- Bộ chỉnh lưu (dùng để chuyển đổi dòng điện xoay chiều thành dòng điện một chiều)
Điều đặc biệt là Mô-đun điều khiển động cơ ECM sử dụng mạng LIN để điều khiển một bóng bán dẫn có chức năng thay đổi dòng điện chạy qua cuộn dây rotor để điều khiển điện áp đầu ra của máy phát điện.
3. Cấu trúc câu lệnh LIN
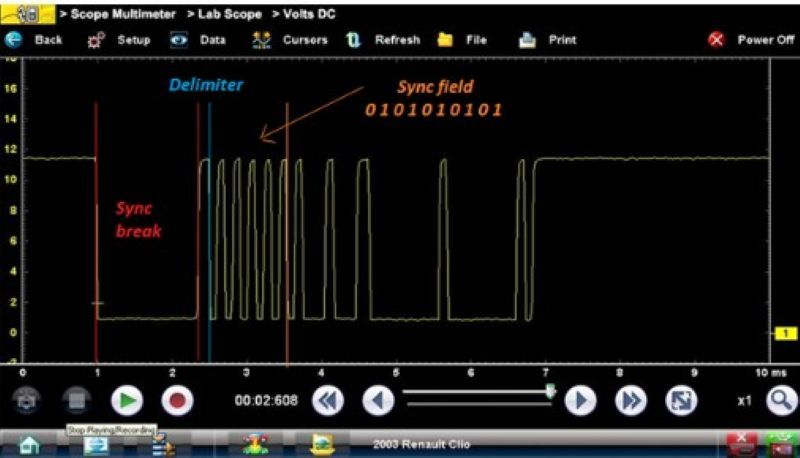
Dạng sóng bên dưới hiển thị một câu lệnh LIN với cấu trúc câu lệnh được xác định. “Sync Break” được sử dụng để báo hiệu bắt đầu câu lệnh. Bộ phân cách – “Delimiter” cho biết việc hoàn thành “Sync Break” và có tác dụng cho thấy dây LIN không bị ngắn mạch xuống mát.
“Sync field” là để đảm bảo thời gian của câu lệnh được đặt trước khi trường dữ liệu được truyền. Điều này không bắt buộc đối với mạng CAN vì mỗi mô-đun trên mạng CAN có đồng hồ thời gian riêng để tính thời gian câu lệnh.
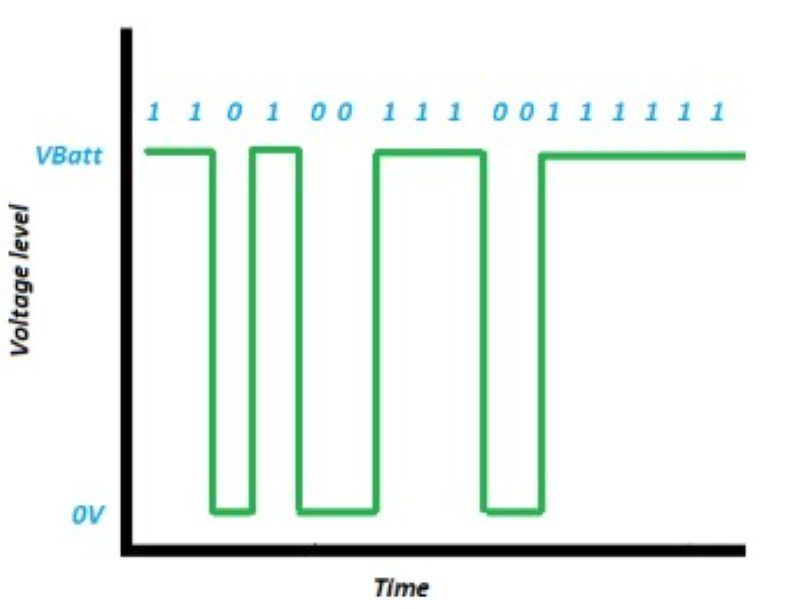
Thông điệp được truyền đi bằng cách điều khiển điện áp trên mạch dữ liệu LIN.
- 1 = Bit 1 – Recessive bit
- 0 = Bit 0 – Dominant bit
Để dữ liệu được truyền tải chính xác, các điều kiện sau đây phải được đáp ứng:
- Đối với bit 1, điện áp LIN phải lớn hơn 80% điện áp ắc quy
- Đối với bit 0, điện áp LIN phải nhỏ hơn 20% điện áp ắc quy
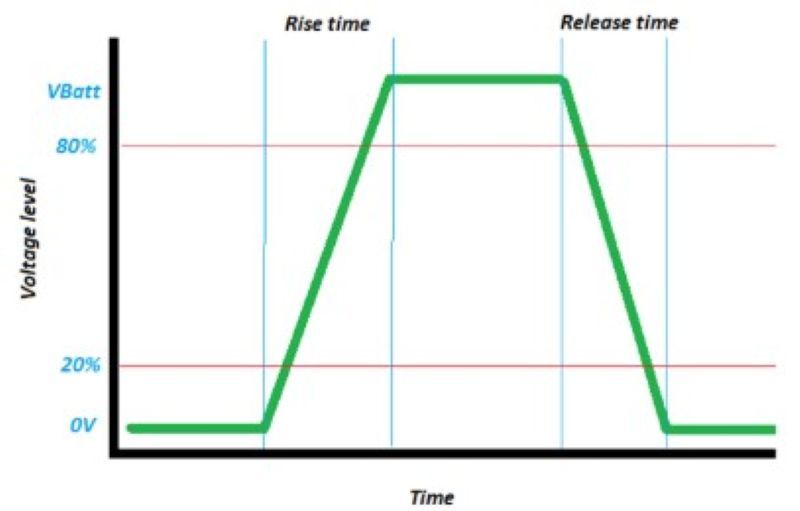
Tốc độ thay đổi hoặc thời gian chuyển đổi giữa bit 0 và bit 1 cũng rất quan trọng đối với việc truyền dữ liệu.
4. Tốc độ truyền dữ liệu
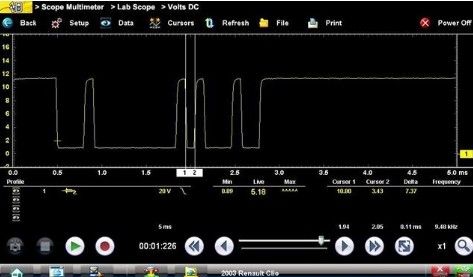
Dạng sóng bên dưới cho thấy một xung LIN điển hình, thời gian truyền một bit là 0,11ms, tương đương với tốc độ truyền dữ liệu là 9480 bit mỗi giây (khoảng 10 kBit/giây).
Trên đây là toàn bộ thông tin chi tiết về mạng giao tiếp cục bộ LIN và ứng dụng mà trung tâm VATC muốn gửi đến bạn. Hy vọng bạn đã có thêm kiến thức hay trong ngày cho mình.
Nếu bạn có đang đam mê hoặc muốn tìm hiểu về các khóa học trong ngành ô tô thì liên hệ ngay với trung tâm VATC theo thông tin dưới đây để được tư vấn chi tiết nhất nhé!


