
Ở bài trước, chúng ta đã tìm hiểu tổng quan về ESP, và để nối tiếp chủ đề này thì bài viết tiếp theo đây sẽ là nội dung về cơ sở lý thuyết hoạt động hệ thống ESP. Đọc đến hết bài viết để không bỏ lỡ bất kỳ thông tin hữu ích nào nhé!
1. Lực và moment
Một vật chịu đựng các lực và moment khác nhau. Nếu tổng số lực và moment tác động lên vật bằng không, vật sẽ đứng yên hoặc chuyển động thẳng đều khi bỏ qua ma sát. Nếu tổng số này khác 0, thì vật sẽ di chuyển theo hướng của tổng lực này.
Loại lực được biết đến nhiều nhất chính là lực hấp dẫn. Lực hấp dẫn tác động theo hướng hướng vào tâm của trái đất.
Và ngoài trọng lực, còn những thành phần lực tác dụng vào xe chúng ta như:
- Lực kéo (Tractive Force)
- Áp lực phanh (Brake Pressure) – Lực chống lại lực kéo.
- Lực bên (Lateral Force) – Lực tạo ra khả năng quay vòng cho ô tô.
- Lực bám mặt đường (Adhesion Force) – Lực bám là kết quả chính của trọng lực, lực ma sát và một số lực khác.
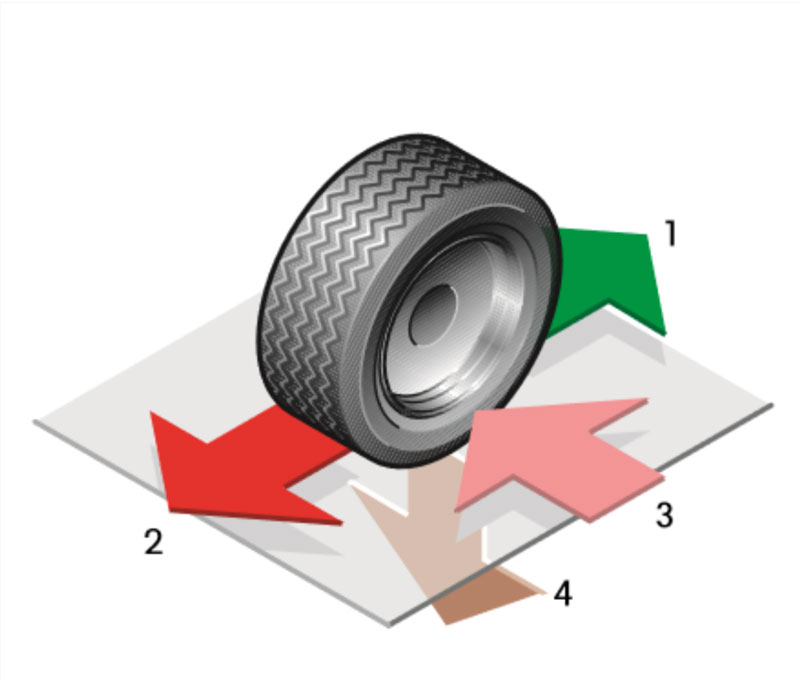
Bên cạnh đó, ô tô vẫn chịu tác động của các lực dưới đây:
- Moment quay vòng (Yaw moment) – Lực giúp Ô tô chuyển hướng.
- Moment bánh xe(Wheels Moment) – Lực giữ cho ô tô chuyển động.
- Và một số lực khác như lực khí động học(aerodynamic drag).
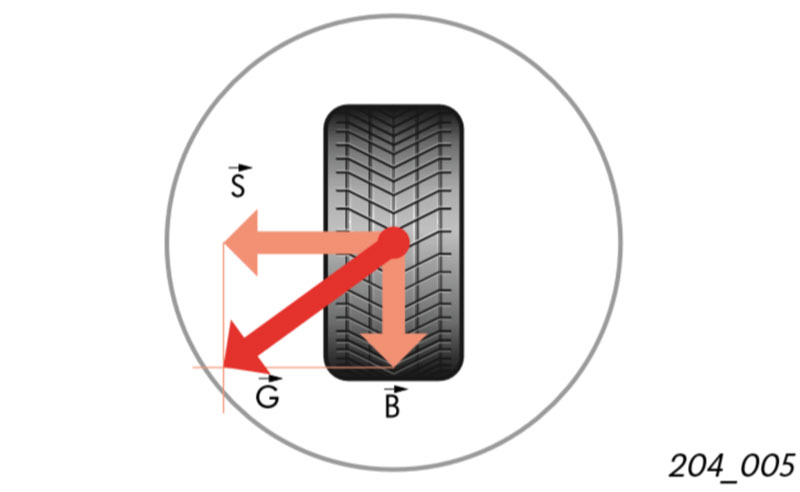
Để tìm ra mối tương quan giữa những lực được liệt kê ở trên, ta sử dụng vòng tròn ma sát Kamm. Bán kính của vòng tròn Kamm được định nghĩa bởi lực bám giữa đường và các bánh xe. Nói cách khác, bán kính vòng tròn ma sát sẽ nhỏ đi khi lực bám giữa bánh xe và mặt đường nhỏ (vòng tròn a) và bán kính vòng tròn ma sát sẽ lớn khi lực bám giữa bánh xe và mặt đường lớn (vòng tròn b).
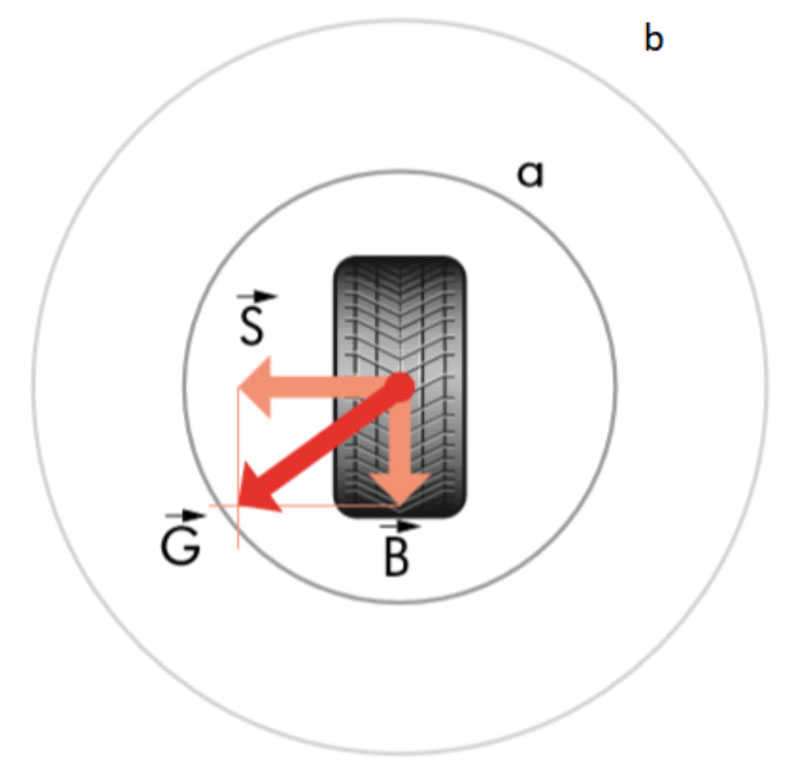
Những vấn đề cơ bản trong vòng tròn ma sát Kamm chính là tổng hợp lực G (theo nguyên tắc hình bình hành) của lực ngang (Lateral Force) S và lực phanh hoặc lực kéo B.
Ô tô chỉ ổn định khi lực tổng hợp G nằm trong vòng tròn tròn ma sát. Nếu lực tổng hợp G nằm ngoài vòng tròn ma sát, ô tô sẽ không điều khiển được (mất khả năng lái).
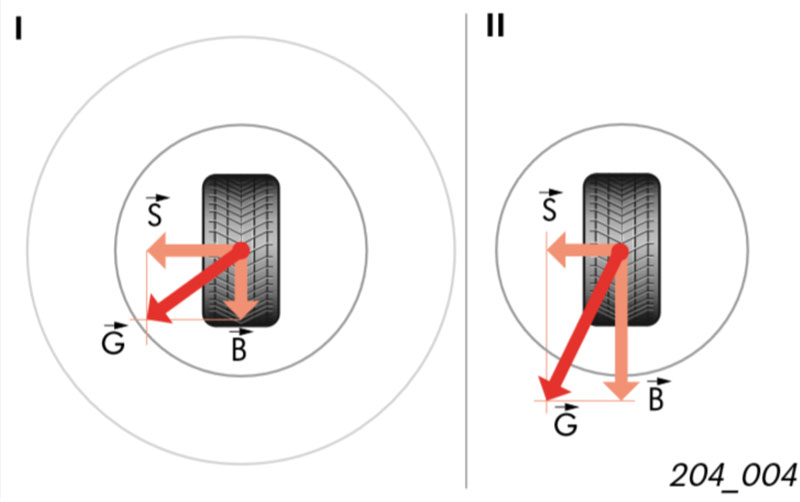
Ta sẽ cùng xem xét sâu hơn về mối quan hệ bên trong giữa 2 các lực trên (tổng hợp lực G, lực quay vòng S và lực B).
- Khi độ lớn của lực tổng hợp giữa áp lực phanh và lực quay vòng vẫn còn nằm trong vòng tròn ma sát. Ô tô sẽ không gặp vấn đề khi thực hiện quay vòng.
- Bây giờ, khi tăng áp lực phanh lên, lực quay vòng sẽ giảm dần.
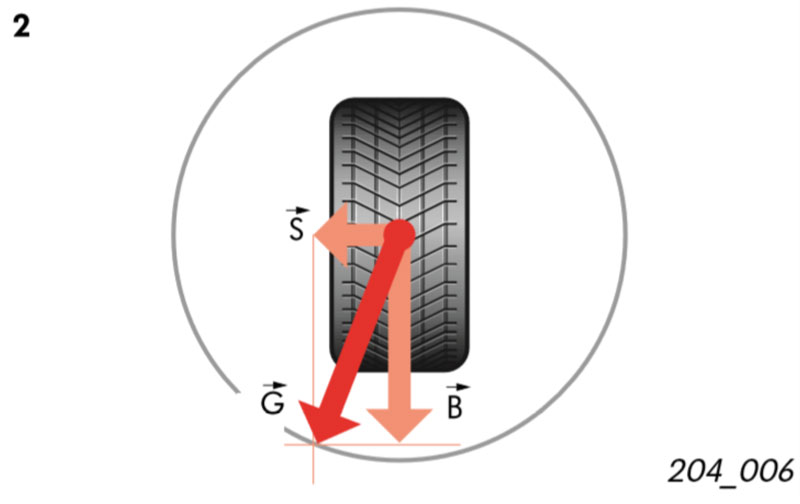
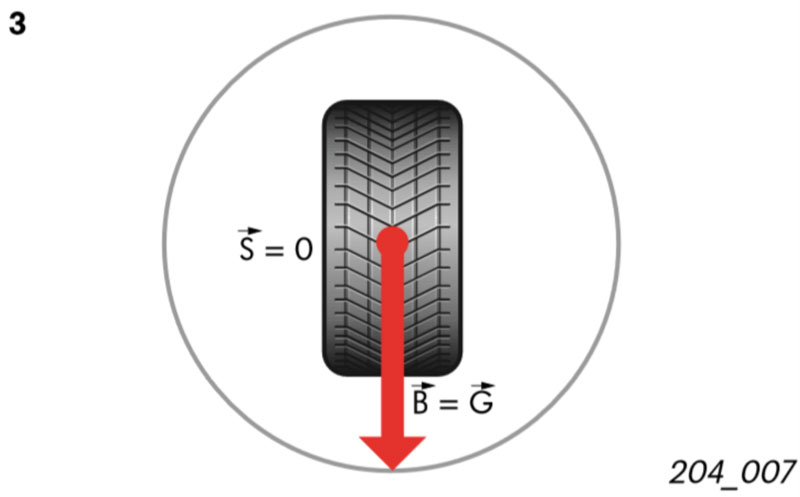
- Khi tổng hợp lực giữa áp lực phanh và lực quay vòng bằng với áp lực phanh, bánh xe sẽ bị khóa. Ô tô sẽ không thể thực hiện quay vòng nữa do không còn lực quay vòng. 1 trường hợp tương tự xảy ra giữa công suất đầu vào của động cơ (Input Power) và lực quay vòng. Nếu lực quay vòng bằng không do công suất đầu vào được sử dụng hoàn toàn, lúc đó bánh xe sẽ quay trơn (bị trượt).
2. Quá trình điều khiển động học của ESP
2.1. Nguyên lý hoạt động
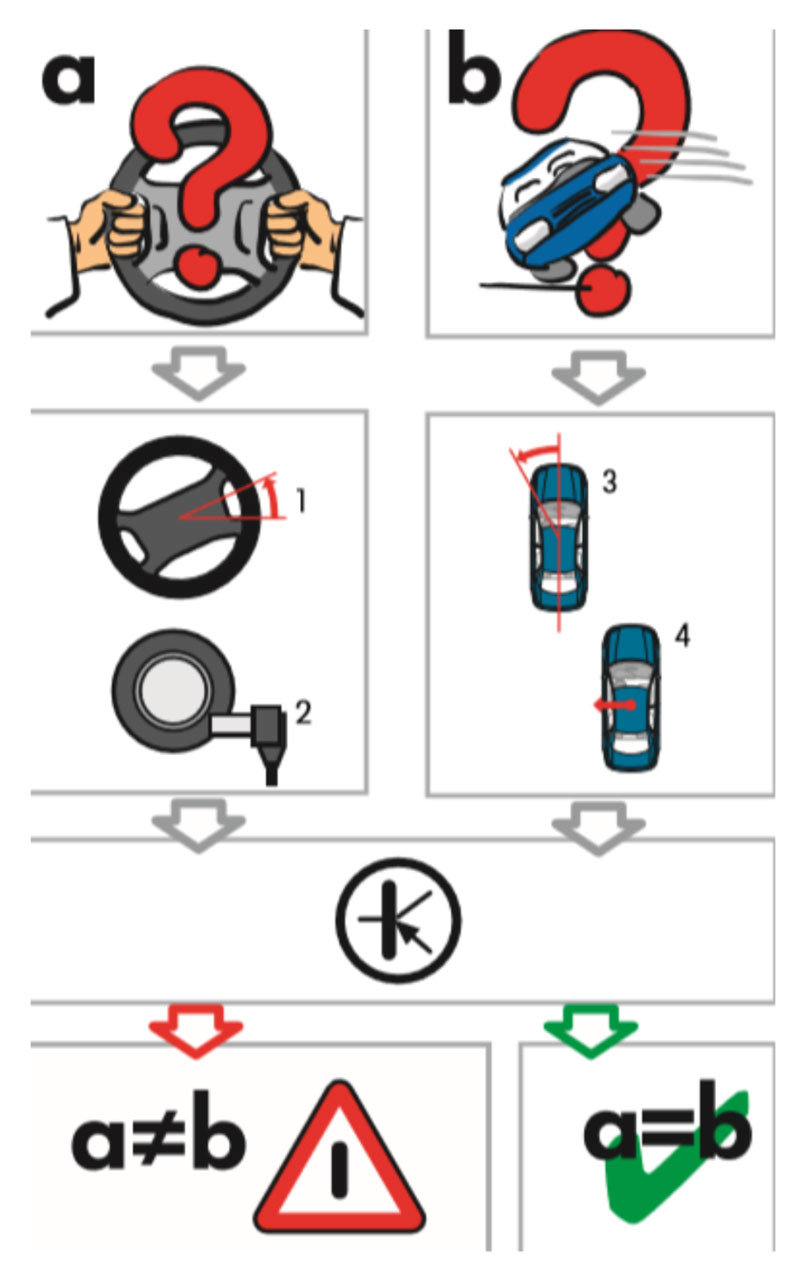
Trước khi ESP nhận biết được 1 trường hợp lái khẩn cấp, nó phải trả lời được 2 câu hỏi sau:
- Người lái sẽ đánh lái theo hướng nào?
- Ô tô sẽ đi theo hướng nào?
Hệ thống ESP sẽ trả lời câu hỏi số 1 từ cảm biến góc lái và cảm biến tốc độ tại các bánh xe.
Tiếp theo đó câu hỏi số 2 sẽ được cung cấp bởi cảm biến quay vòng (Yaw sensor) và cảm biến nhận biết tăng tốc lực ngang (Lateral acceration).
Từ những thông tin từ cảm biến trên, ESP sẽ trả lời được các câu hỏi và cho ra thông tin là a và b. Từ đó, ESP giả định được là trường khẩn cấp có thể xảy ra và từ đó can thiệp vào các hệ thống điều khiển.
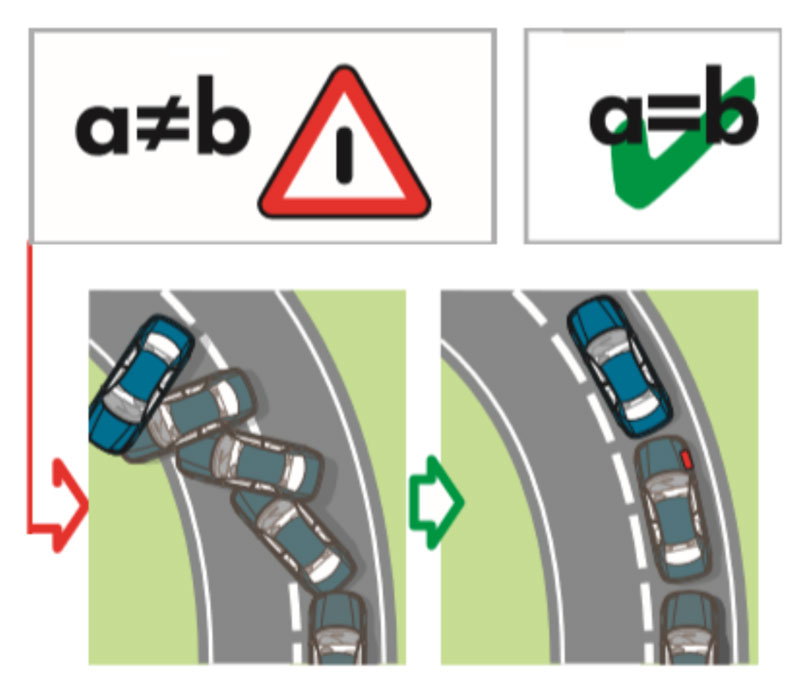
1 trường hợp nguy hiểm sẽ được biểu hiện trong 2 dạng hành vi khác nhau của ô tô:
- Nếu ô tô đang có nguy cơ bị Understeer. Bằng cách cho phanh sau bên trong( bánh gần tâm quay) hoạt động 1 hiệu quả (điều chỉnh lực phanh phù hợp) và can thiệp vào hệ thống quản lý hộp số và động cơ, ESP sẽ ngăn chặn được ô tô đi lệch khỏi cua.
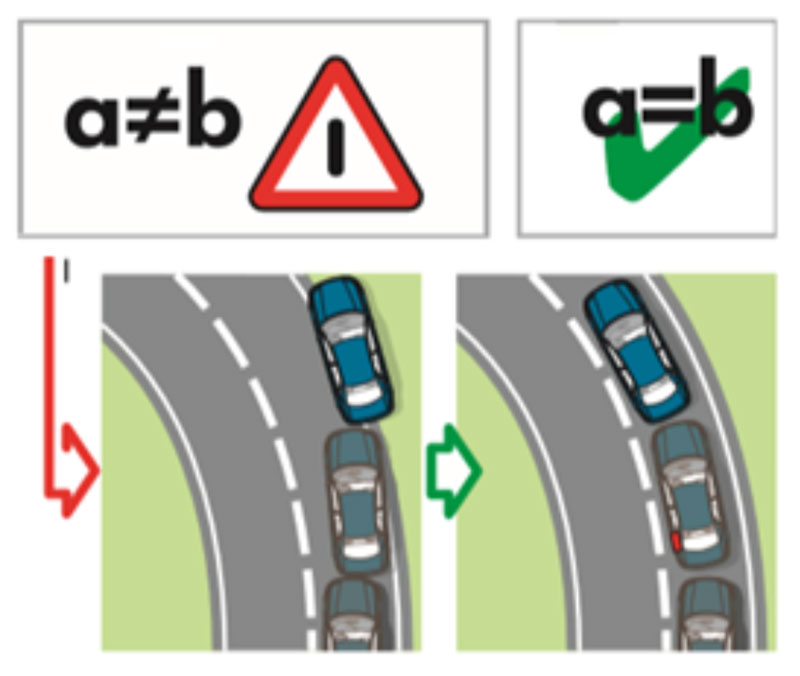
- Nếu ô tô đang có nguy cơ bị Oversteer. Bằng cách cho phanh trước nằm ngoài (tâm quay) hoạt động 1 cách hiệu quả (điều chỉnh lực phanh phù hợp) ) và can thiệp vào hệ thống quản lý hộp số và động cơ, ESP sẽ ngăn chặn được ô tô đi lệch khỏi hiện tương trượt.
2.2. Quá trình điều khiển
- ESP có thể ngăn chặn được cả trường hợp Understeer & Oversteer.
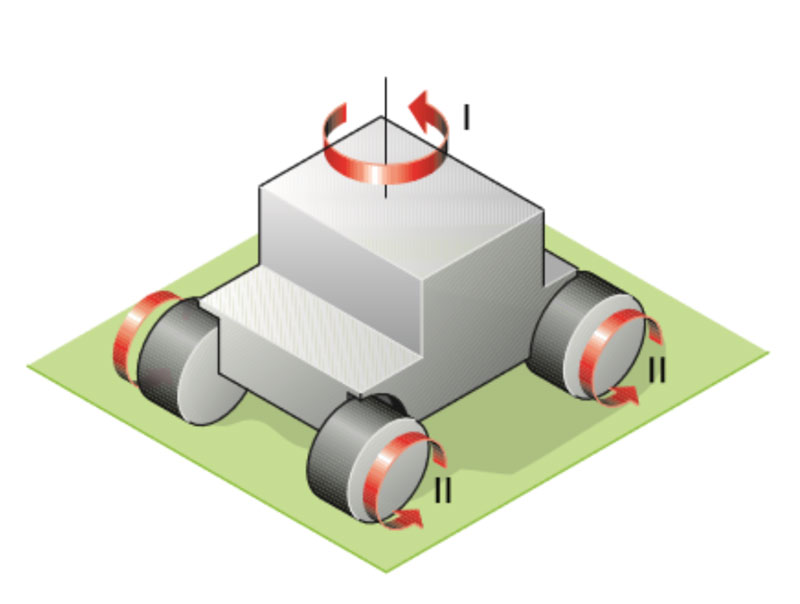
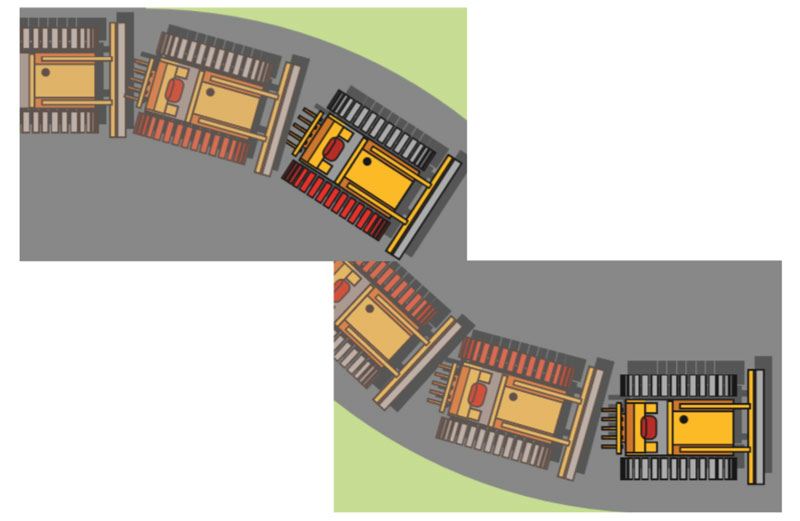
2.2.1. Quay vòng xe
Nguyên lý hoạt động cơ bản của ESP là theo dõi tình trạng hoạt động của xe.
Ví dụ như chiếc xe ủi muốn thực hiện quay vòng sang trái. Bánh xe bên góc sẽ bị phanh lại và bánh xe bên ngoài sẽ tăng tốc để quay vòng để trả về hướng đi ban đầu, bánh xe mà lúc trước bị phanh lại bây giờ sẽ tăng tốc để quay vòng và bánh còn lại sẽ bị phanh lại.
2.2.2. Khi xe gặp trường hợp khẩn cấp trên đường
ESP còn có thể can thiệp sâu vào hệ thống điều khiển khi xe đang di chuyển trên đường.
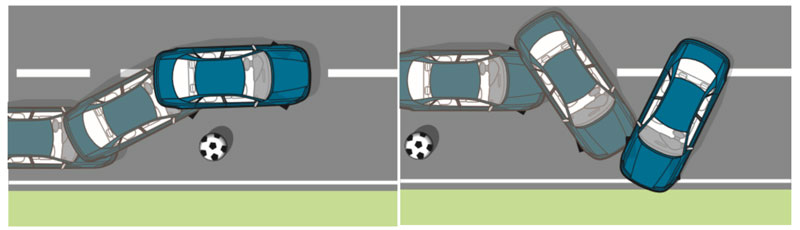
Ví dụ sau đây để thể hiện xe không có trang bị ESP khi gặp trường hợp khẩn cấp:
- Trường hợp ô tô cần phải tránh vật đột ngột xuất hiện trên đường. Ngay ban đầu, tài xế sẽ bẻ lái rất nhanh về phía tay trái và sau đó lập tức đánh lái về phía tay phải.
- Ô tô sẽ mất ổn định do việc đánh lái của tài xế và chuyển động ở bánh xe phía sau không theo nguyên lý hoạt động hệ thống lái. Tài xế sẽ không thể làm chủ được sự quay vòng của ô tô quanh trục thẳng đứng.
Hãy cùng quan sát cùng trường hợp này với ô tô có trang bị hệ thống ESP.
Khi ô tô có dự định là tránh vật thể. Dựa trên dữ liệu được cung cấp từ các cảm biến, ESP nhận diện được ô tô chuẩn bị mất cân bằng. Lúc đó hệ thống sẽ tính toán để chống lại sự mất cân bằng nó:
- ESP sẽ phanh bánh trái ở phía sau lại. Nó sẽ hạn chế lại sự chuyển động của ô tô do đó lực ngang tác động lên bánh trước giữ được sự ổn định của xe.
- Khi mà ô tô lảo đảo qua hướng trái, tài xế bẻ lái theo hướng phải. Để giúp tài xế đánh lái tối đa nhưng vẫn giữ được khả năng lái, Bánh xe trước phải sẽ bị phanh lại. Lực tác động lên bánh sau sẽ quay tự do để đảm bảo tối ưu sự hình thành lực quay vòng của các bánh xe ở cầu sau.
- Việc chuyển làn đường nhanh chóng sẽ làm ô tô quay quanh trục thẳng đứng. Để ngăn cản việc bánh xe phía sau khỏi việc mất lái, bánh xe trước trái sẽ bị phanh lại. Trong trường hợp nguy hiểm, bánh xe này sẽ bị phanh với lực phanh khá lớn để giới hạn được sự hình thành lực quay vòng ở cầu trước (Vòng tròn ma sát Kamm).
- Khi tất cả yếu tố gây mất ổn định xe được điều chỉnh, ESP kết thúc sự điều khiển của nó và tiếp tục giám sát tình trạng hoạt động của xe.
3. Cấu tạo hệ thống ESP
- Như đã đề cập ở trên, hệ thống ESP được xây dựng dựa trên những lý thuyết về hệ thống TRC (HT điều khiển lực kéo).
- Tuy nhiên, ESP có thêm những chức năng: Hệ thống ESP có thể nhận biết và cải thiện tình trạng không ổn định của ô tô khi khởi động ở thời gian đầu (khi động cơ còn nguội), như hiện tượng trượt.
- ESP cần những tín hiệu đầu vào để tính toán, nhận biết tình trạng xe và thực hiện các chức năng điều khiển, các hệ thống ESP của từng hãng sẽ có những giá trị đầu vào khác nhau nhưng tổng quan, 1 hệ thống ESP cần có các thông số tín hiệu như:
- Tỷ lệ quay vòng xe (Rate of Yaw).
- Gia tốc quay vòng (Lateral acceleration).
- Tốc độ bánh xe (Wheel speeds).
- Góc lái (Steering Angle).
- Áp suất phanh (Brake Pressure).
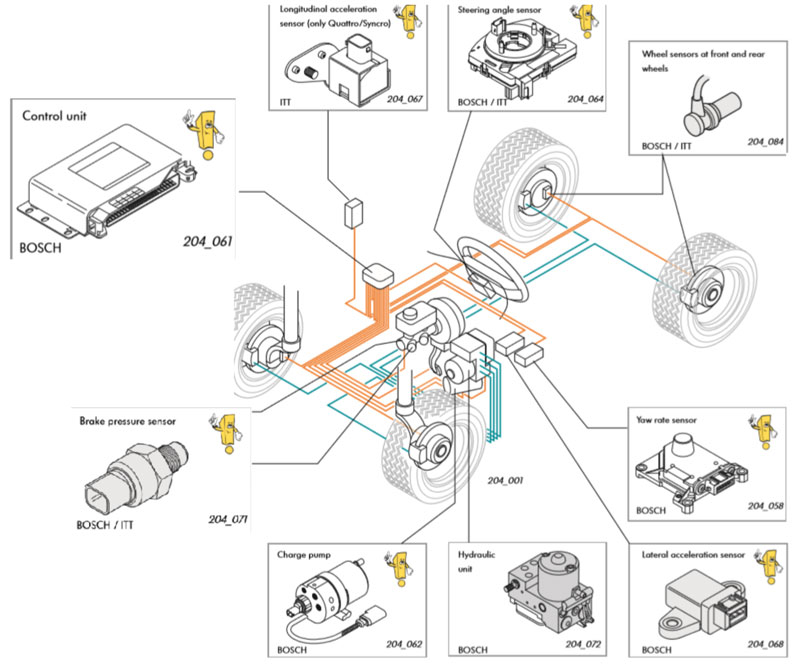
- Chính vì vậy, một số chi tiết cần phải có đối với 1 hệ thống ESP cơ bản:
- Hộp điều khiển ESP bao gồm thiết bị điều khiển và cơ cấu chấp hành.
- Cảm biến tốc độ bánh xe.
- Cảm biến quay vòng xe (quanh trục thẳng đứng) – Yaw rate.
- Cảm biến đo gia tốc quay vòng xe (Sensor measures Lateral accerelation).
- Cảm biến đo gia tốc xe (Sensor measures Longitudinal accerelation).
- Cảm biến đo góc lái (Steering – angle sensor).
- Cảm biến áp suất phanh ( Internal Brake pressure sensor).
- Cảm biến đo chiều dày má phanh (Brake pad wear sensor).
- ,…
4. Cấu tạo hệ thống ESP của Bosch sử dụng trên các dòng xe của Audi
4.1. Cấu tạo cơ bản của hệ thống ESP Bosch
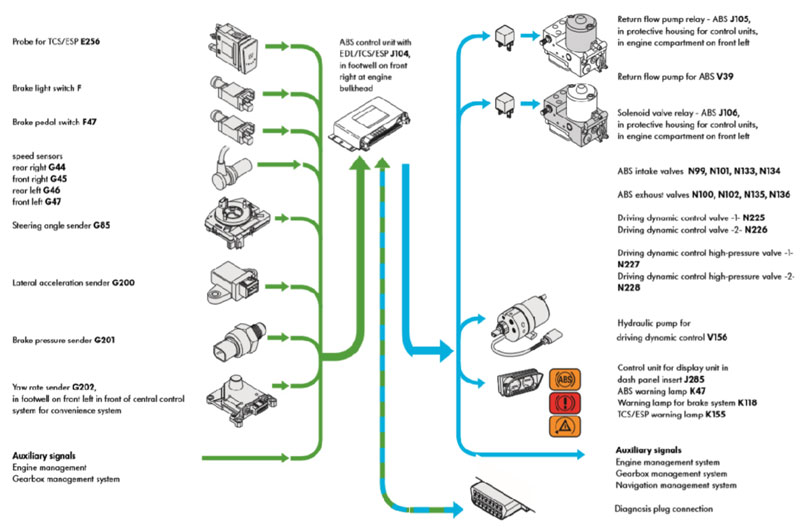
4.2. Sơ đồ khối về tín hiệu và cơ cấu chấp hành hệ thống ESP của Bosch
4.3. Quy trình điều khiển
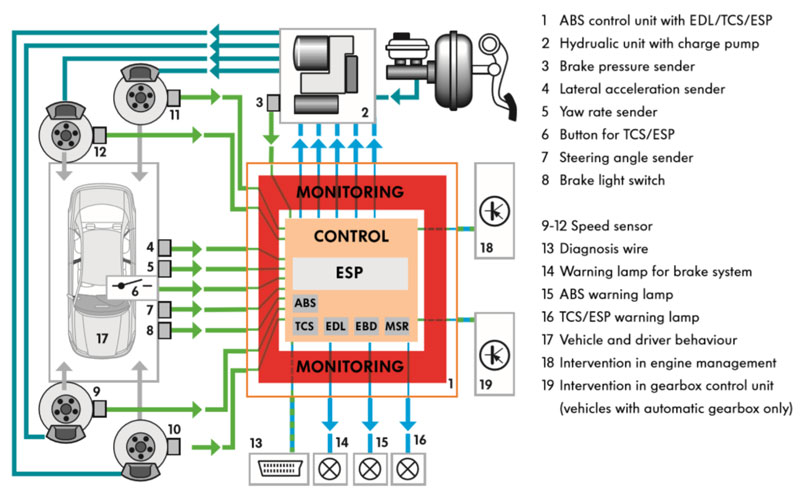
Trong đó:
1. Thiết bị điều khiển điện tử được trang bị ABS, EDL, TCS, ESP,…
2. Hệ thống thủy lực cung cấp cho bơm.
3. Cảm biến đo áp lực phanh.
4. Cảm biến đo gia tốc quay vòng.
5. Cảm biến đo tỷ lệ quay vòng của xe.
6. Nút ấn để kích hoạt/tắt ESP/TCS.
7. Cảm biến đo góc đánh lái.
8. Công tác đèn phanh.
9 – 12: Cảm biến tốc độ bánh xe.
13. Dây diện chuẩn đoán.
14. Đèn cảnh báo cho hệ thống phanh.
15. Đèn cảnh báo hệ thống ABS.
16. Đèn cảnh báo hệ thống TCS/ESP.
17. Tình trạng ô tô và hành vi người lái.
18. Hệ thống can thiệp điều khiển động cơ.
19. Hệ thống can thiệp điều khiển hộp số (chỉ có trên hộp số tự động).
Chức năng của các cảm biến trong hệ thống ESP:
- Cảm biến tốc độ bánh xe & góc đánh lái:
Cảm biến tốc độ bánh xe cung cấp một lượng thông tin liên tục về tốc độ mỗi bánh về thiết bị điều khiển.
Cảm biến đo góc đánh lái là cảm biến duy nhất cung cấp thông tin thông qua mạng CANbus để đến thiết bị điều khiển. Thiết bị điều khiển điện tử sẽ tính toán dựa trên hướng đánh lái và xử lý tình trạng hoạt động của ô tô dựa trên tổ hợp 2 loại thông tin trên.
- Cảm biến gia tốc quay vòng & cảm biến tỷ lệ quay vòng (Yaw rate Sensor):
Cảm biến gia tốc quay vòng sẽ ra tín hiệu cho thiết bị điều khiển biết khi nào ô tô bị mất lái bên nào (Break away to the side) và cảm biến đo tỷ lệ quay vòng (Yaw rate sensor) sẽ ra tín hiệu cho thiết bị điều khiển biết khi nào ô tô bắt đầu trượt.
Thiết bị điều khiển sẽ tính toán trạng thái đang vận hành của ô tô dựa trên 2 thông tin trên.
- Nếu giá trị đã được thiết lập (Set sẵn trong ECU điều khiển) và giá trị thực tế vận hành không khớp với nhau, ESP sẽ can thiệp điều chỉnh dựa trên thông số tính toán.
- Hệ thống ESP sẽ quyết định:
- Bánh nào sẽ bị phanh hoặc tăng tốc và phanh hoặc tăng tốc ở mức độ như thế nào.
- Moment động cơ khi nào bị giảm và khi nào hệ thống điều khiển hộp số được kích hoạt trên ô tô (với ô tô trang bị hộp số tự động).
- Hệ thống ESP sẽ kiểm tra để xem việc điều chỉnh có hiệu quả hay không thông qua các tín hiệu trả về từ các cảm biến. Nếu điều chỉnh thực hiện tốt, ESP kết thúc quá trình điều chỉnh và tiếp tục giám sát tình trạng hoạt động của ô tô. Nếu việc điều chỉnh vẫn chưa hiệu quả, Chu trình điều chỉnh sẽ được thực hiện lại.
- Khi sự điều chỉnh này diễn ra, hệ thống điều khiển sẽ làm sáng đèn ESP để hiển thị cho tài xế nhận biết.
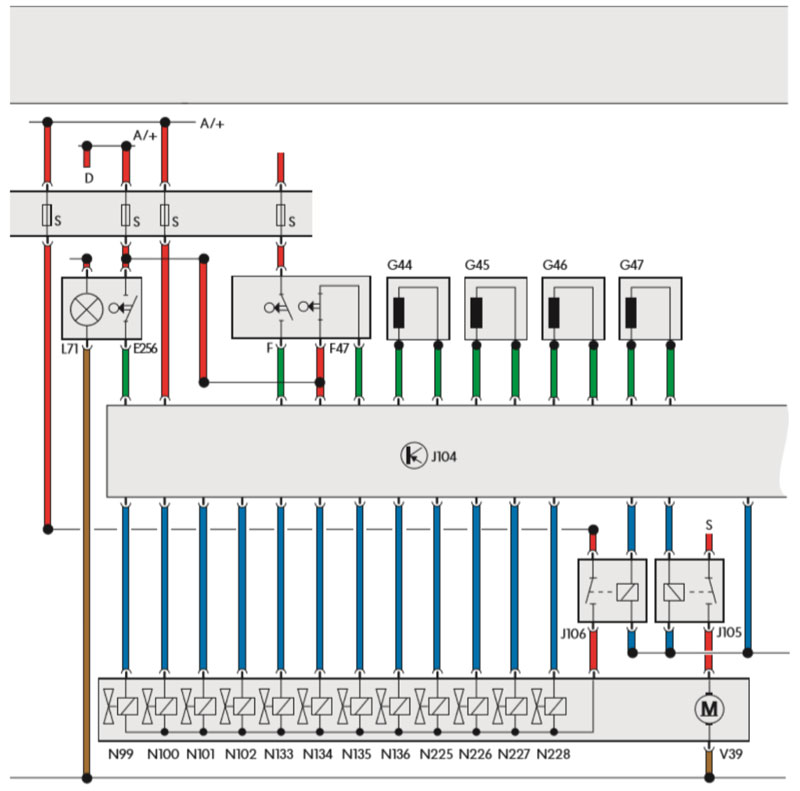
4.4. Sơ đồ mạch điện hệ thống ESP
Trên đây là toàn bộ thông tin chi tiết về cơ sở lý thuyết hoạt động hệ thống ESP. Hy vọng bạn đã có thêm kiến thức hay trong ngày. Nếu bạn có đang đam mê hoặc muốn tìm hiểu về các khóa học trong ngành ô tô thì liên hệ ngay với VATC theo thông tin dưới đây để được tư vấn chi tiết nhất nhé!
Trung Tâm Huấn Luyện Kỹ Thuật Ô Tô Việt Nam – VATC
- Địa chỉ: Số 4-6, Đường số 4, Phường Hiệp Bình Phước, Thành Phố Thủ Đức, Thành phố Hồ Chí Minh
- Điện thoại: 0945711717
- Email: info@oto.edu.vn
Xem thêm:


